Search the Community
Showing results for tags 'programmierbeispiel'.
Found 12 results
-
Oh man, dort hatte ich mal mit dem Projekt angefangen, und das ist schon 9 Monate her. Höchste Zeit mal wieder was dazu zu schreiben. Ich habe ein neues Thema dafür auf gemacht, weil sich doch ein paar Dinge geändert haben, aber das Projekt dafür jetzt auch rund läuft. Fangen wir nochmal vorne an, was ist das Ziel? Da die Taranis X9E nicht über Multiswitch-Möglichkeiten verfügt, wie das z.B. mit dem Modulen von IMTH für Graupner möglich ist, habe ich nach einem Weg gesucht möglichst viele "Funktionen" vom Sender zum Empfänger zu übertragen, ohne mir aber die 32 möglichen PPM Kanäle zuzubauen. Diese ganzen Funktionen sollen irgendwann auf meinem Rettungskreuzer Eiswette die Beleuchtung, das Radar, und die Scheibenwischer schalten. Scheibenwischer? Bist du komplett wahnsinnig? Shush...immer diese Stimmen aus dem Off, die stören wollen: JA SCHEIBENWISCHER! Es gibt schöne kleine Microservos und Linearservos, groß, wie eine Briefmarke, warum nicht versuchen die 5 Dinger auch irgendwie unterzubringen. Genug Schaltkanäle sollten sich finden lassen. Damit die Stimmen noch mehr zu diskutieren haben, möchte ich das Ganze dual steuern können. Nur über den Sender ist langweilig, warum also nicht über ein Smartphone steuern können, wenn die in der Vitrine geparkt ist und einfach nur schön aussehen soll? Die Beleuchtung soll zudem noch halbwegs vernünftig sein, und einem nicht beim Einschalten hell wie die Sonne entgegen leuchten. Also müssen die LED irgendwie individuell gedimmt werden. Was braucht man für diese Anforderungen? Fangen wir an den Ausgängen an: gedimmte LED, das schreit nach einer PWM Steuerung. Adafruit (und auch andere als Kopie davon) bieten eine Platine auf Basis des PCA9685 PWM Treiberbausteins an. https://www.adafruit.com/product/815 Das Modul hat 16 Kanäle, jeder kann unabhängig eingestellt und angesprochen werden. Die Ausgangsspannung ist 3,3V und der Strom wird pro Kanal automatisch auf 10mA begrenzt. Für LED sind diese Eckdaten völlig ausreichend. Außerdem kann man Servos anschließen und ansteuern. Das Modul arbeitet schließlich mit PWM, was nichts anderes ist, als das Signal, was der Empfänger für Servos generiert. Man muss nur ein wenig nachdenken oder ausprobieren, dass man die übliche Einschaltdauer für Servos hin bekommt. Da die Servos etwas mehr Strom als die LED brauchen, gibt es einen separaten Kontakt zur Stromversorgung auf den Platinen. Dazu später mehr. Insgesamt bin ich bei der Eiswette mit allen LED für die Navigationsbeleuchtung, Deck- und Arbeitsscheinwerfer, Suchscheinwerfer, 6 LED für das Blaulicht und die Servos auf 39 Ausgänge gekommen. Es werden also drei von den PWM Modulen benötigt. Der Motor des Radars hat mir zusammen mit den PWM Modulen einen üblen Scherz gespielt. Die Anleitung für den PWM Treiber sagte aus, dass der Strom auf 25mA begrenzt ist. Das sollte für ein kleines Motörchen, wie dieses https://www.sol-expert-group.de/1zu87modellbau/Motor-und-Getriebe/Aufgebaute-Getriebe/Mikro-Planeten-Getriebe-G700::677.html locker reichen. An einer Mignon-Batterie als Test lief der schon in einer guten Drehzahl, also habe ich den Motor an das Modul angeschlossen. Mit voll aufgerissener PWM kam der Motor aber nicht annähernd an die Drehzahl, als mit einer Mignonzelle. Hmmm.....Batterie = 1,5V => gute Drehzahl, PWM 3,3V = Miese Drehzahl? Was soll denn der Quatsch? Ich hab alles auf den Kopf gestellt, bis ich mal über das Labornetzteil den Strom gemessen habe, den der Motor bei 1,5V zieht. Der Motorstrom war zu hoch. Die PWM Boards haben an den Ausgängen für jeweils 4 Kanäle einen 220 Ohm Widerstandsbaustein fest eingebaut. Damit war die Strombegrenzung auf 10mA runtergesetzt, und der Motor hatte zu wenig Dampf, um schnell genug zu drehen. Also was tun? Diese SMD Maikäfer auslöten und irgendwas dämliches probieren? Neee, nachher geht was anderes dadurch kaputt, dann ärgere ich mich. In der Sammelkiste hatte ich aber noch ein Relaismodul, was über ein Servosignal zu schalten ist. Also wird das genommen, davor eine regelbare Spannungsquelle gesetzt und gut ist.
-
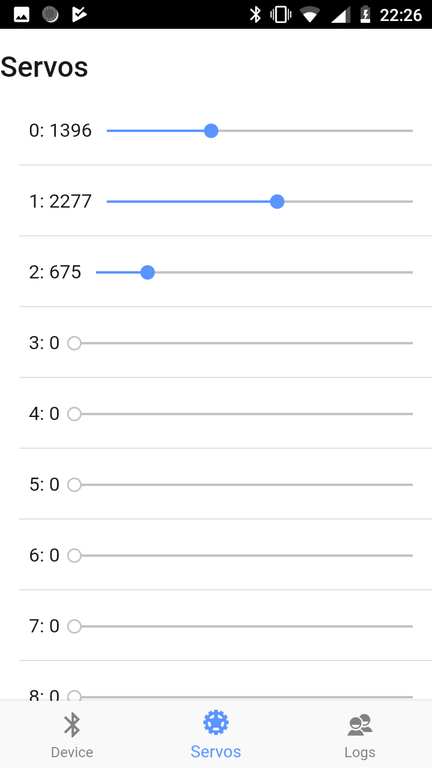
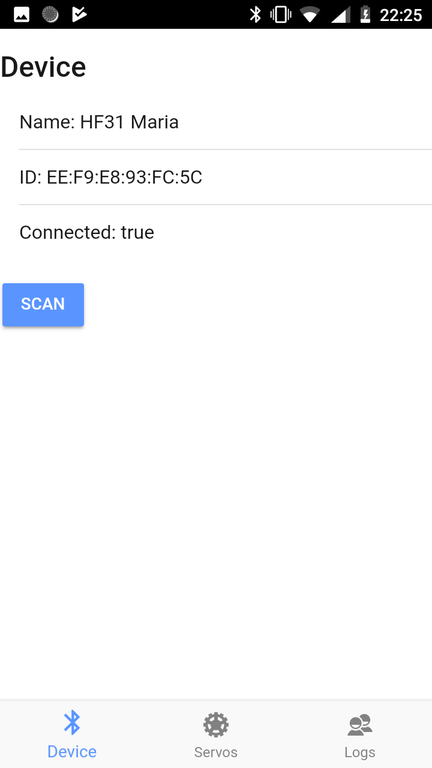
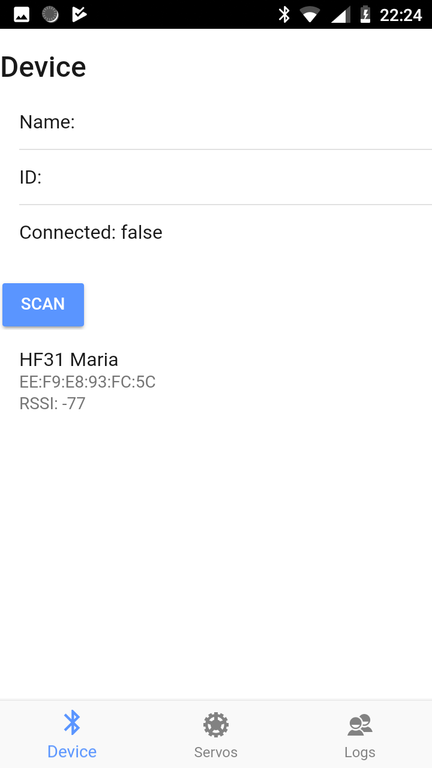
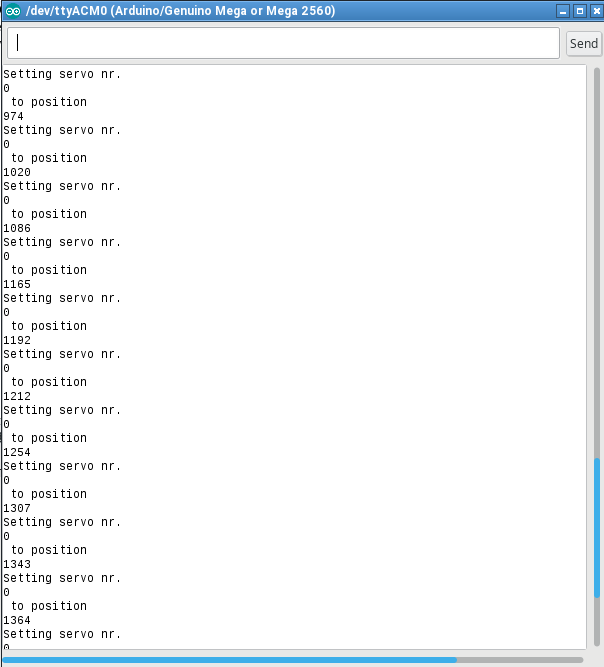
Hallo zusammen, vielleicht erst mal zum Hintergrund: Seit (vielen) Jahren bastle ich am Modell der "HF31 Maria" rum - eines Fisch-Evers, der erst rein unter Segeln und später mit Hilfsmotor unterwegs war und nun seine letzte Ruhe-Stätte im deutschen Museum in München bekommen hat. Hier seht Ihr den aktuellen Bauzustand: Die Fertigstellung wird sich bestimmt weitere Jahre hin ziehen, ich möchte daher erst mal "nur" Motor und Ruder steuern. Dann kommen nach und nach die einzelnen Segel dazu. Die möchte ich jeweils einzeln ansteuern können und auch ausschalten können, wenn sie nicht gebraucht werden - ich habe mir ausgerechnet, dazu brauche ich 5 Servos + 1 Servo fürs Ruder + Motor = 7 zu steuernde Größen. Wobei sich die ganzen gerade gesetzten Segel auf einem Hebel befinden sollen. Klar könnte man das Ganze auch über nen FrSky mit entsprechend vielen Kanälen und OpenTX Programmierung hin kriegen, aber selbst dann: Ich fürchte, die Trimmerei wird dann auch ein zie,liches Gefummel. Daher habe ich mich entschieden, die Steuerung einem Arduino zu überlassen. Dieser wird durch ein Handy über BlueTooth angesteuert, mit dem man das Verhältnis der Segel zueinander einstellen kann usw. Derzeit soll die gesamte Steuerung über das Handy erfolgen - einen S-Bus geeigneten Sender habe ich (noch) nicht. Ob überhaupt ein anderer Sender als das Handy hin kommt, wird sich noch entscheiden. Hier erst mal die Hardware: Was Ihr hier seht, ist ein Arduino Mega (Clone), auf dem eine BlueTooth-Platine steckt, auf der wiederum der Servo-Shield mit 16 Serv0-Ausgängen steckt. Das Ganze will durch Software angesteuert werden: Dazu bedarf es einerseits eines Sketches, andererseits einer Handy-App, die beide selbst programmiert werden wollen: Der Sketch - wie bei Arduino gewohnt - in C++. Für die Handy-App habe ich das Ionic-Toolkit und Cordova ausgewählt (d.h. Programmierung als Web-App in Typescript). Den jeweils aktuellen Stand des Quellcodes gibt es hier: https://github.com/BernhardBrem/SteeringMaria Das funktioniert schon: Handy mit Arduino verbinden, Befehle zum Stellen der Servos senden. Servos dran habe ich aktuell noch nicht, da muss ich mir erst noch eine Extra-Stromversorgung an die Servo-Platine löten. Hier einige ScreenShots: Nach dem Scan findet das Handy den Arduino, der sich schon mit dem Modell-Namen meldet: Drauf tippen, dann verbindet sich das Teil... Der Servo-Dialog, mit dem ich die Servos einzeln stellen kann... Die Reaktion des Arduinos: Die Position kommt an und kann weiter verarbeitet werden. Das Ganze muss natürlich noch wachsen...


-

OpenTX Companion für FrSky Taranis X9E: Anfängererfahrungen
xoff posted a topic in Sender, Empfänger, Module
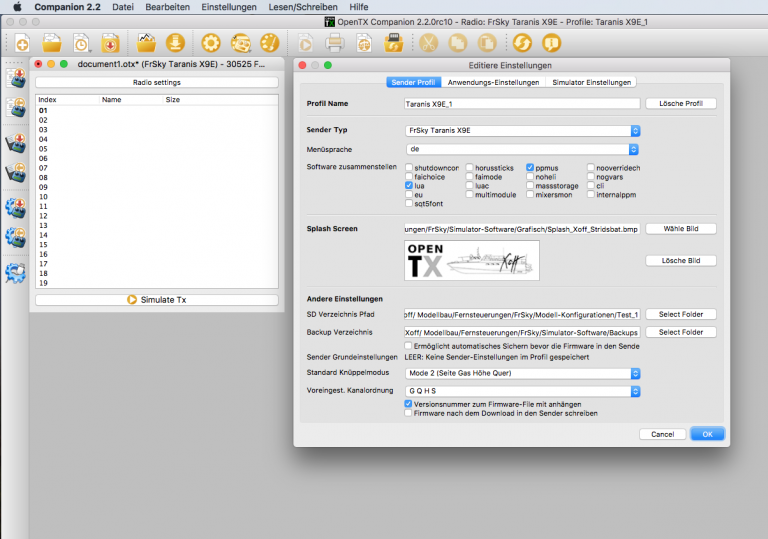
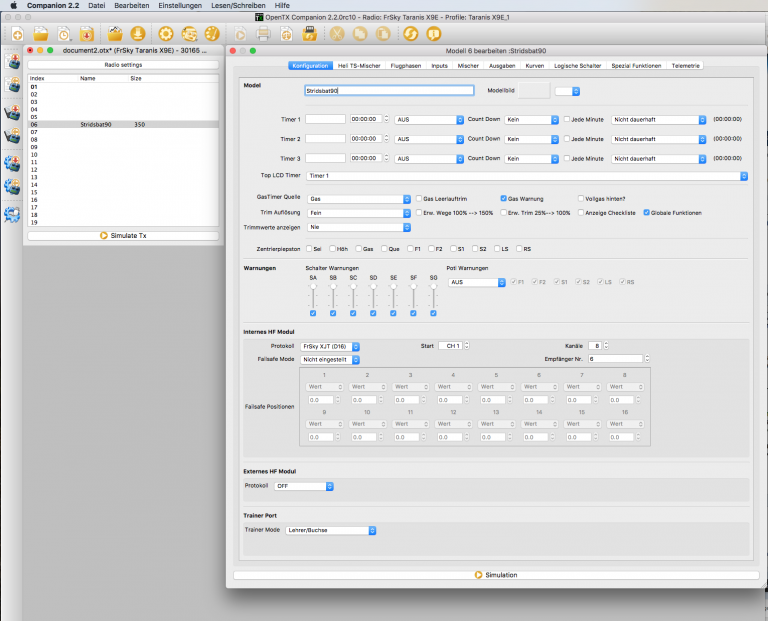
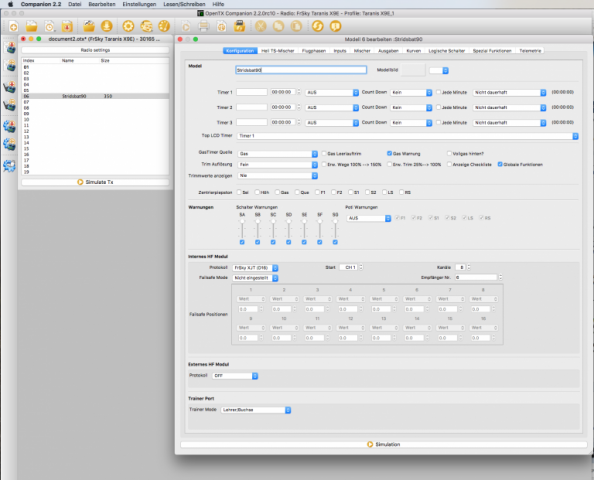
Da ich mich schwer mit dem Gedanken trage, in Zukunft auf FrSky-Sender und deren Software OpenTX mit der Simulatorsoftware Companion zu setzen, erlaube ich mir, einen Thread aufzumachen, der in erster Linie die absoluten Anfängerfragen behandeln soll. Heute sind folgende Versionen der Software aktuell: Companion für OpenTX 2.1.9, sie kann hier heruntergeladen werden. Es existiert auch bereits ein sehr weit fortgeschrittenes Release 2.2.0 RC10 N362, das schon wacker benutzt wird. Die Release-History kann hier verfolgt werden. Die Simulatorsoftware gibt es - wie es für moderne Software üblich ist - für Windows, Mac, Linux und Ubuntu. Mit der Simulatorsoftware kann die Fernsteueranlage simuliert werden, ohne dass ein Sender vorhanden ist. Ich kann mich also einarbeiten bevor ich mich definitiv für das System entscheide. Das erachte ich als einen grossen Vorteil, denn dadurch erhalte ich einen Einblick in die sehr vielfältigen und eigentlich auch einfachen Möglichkeiten dieses Systems. Es gibt verschiedene Foren, in denen die Konfiguration von Hard- und Software besprochen wird. Das «Original»-Forum des Deutschen Importeurs Engel Modellbau bietet Informationen quasi vom Hersteller: klick Ein bereits sehr aktives und reich gefülltes Forum ist bei der FPV-Community zu finden: klick Sobald ich mich ein wenig eingearbeitet habe, finde ich in diesen Foren spezifische Hilfe....wobei darauf hinzuweisen ist, dass noch sehr wenige Schiffs-Anwendungen besprochen sind. Im Grunde ist das jedoch nicht tragisch, denn die Konfiguration läuft immer nach dem gleichen, relativ simplen Schema ab. Ich liess mich anfangs durch die Diskussionen um EU- (neuste Versionen, also 2.1.x, resp. bald 2.2.x) oder NON-EU-Versionen (2.0.x und älter) der Betriebssysteme verwirren. Wer aber wie ich neu in die Welt der Computerfunken einsteigt muss sich m.E. damit nicht aufhalten. Neu in die EU importierte Sender entsprechen normalerweise den EU-Richtlinien, was auch den gesetzlichen Grundlagen entspricht. Ich werde mich nicht um die ganzen Geschichten mit Downgrading und dergleichen beschäftigen, da ich überzeugt bin, die EU-Version wird mir allerbeste Dienste leisten. Manuals und Anleitungen gibt es auch. User «helle» (auch aktiv in der FPV-Community) schreibt Manuals, welche hier heruntergeladen werden können. Ich brauchte einen Moment, bis ich mich in seine Schreibweise hineingefunden hatte, was wohl an meiner programmatorischen Unbedarftheit (nette Wortschöpfung, gelle?¿?) liegen mag. Heute habe ich es aber geschafft, ein Modell in Companion 2.2 zu erstellen und daran zu arbeiten. Das habe ich mit dem Manual «Modell erstellen mit Companion...» zustande gebracht. Zuerst habe ich einen Sender ausgewählt: Unter [Einstellungen - Sender Profil] kann ich entweder das bereits installierte Profil «Radio1» auswählen oder ein eigenes neues erstellen. Dieses wird dann unter [Einstellungen - Einstellungen] bearbeitet, wie zu Beginn des Manuals «Modell erstellen mit Companion...» beschrieben. Dann erstellte ich mein erstes Modell, indem ich im Companion 2.2-Fenster in der linken oberen Ecke auf das + klickte. Es öffnet sich ein Fenster, das «document.otx (meinSenderName) - xxxx» heisst. Dort auf «Radio Settings» geklickt und schon öffnet sich ein Fenster mit den Sender-Grundeinstellungen. Das Bildchen für den Splash-Screen habe ich selber zusammengeschustert...es ist 212 x 65 pix gross und im Format .bmp. Sind die Einstellungen (Region, Sprache, usw. wie im Manual beschrieben) getätigt, wird der Speicherplatz des Modells durch einfachen Doppelklick auf die entsprechende Index-Nummer des «document.otx (meinSenderName) - xxxx» gelegt und das Fenster mit den Sender-Einstellungen schliesst sich. Klicke ich jetzt doppelt auf den Modellnamen im «document.otx (meinSenderName) - xxxx», so öffnet sich das wohl wichtigste Fenster «Modell X bearbeiten», wo ich alle Einstellungen für die Funktionen vornehmen kann. Da muss ich mir die Anleitungen im Manual durchlesen und etwas ausprobieren - was eben in der Simulation, die unten in diesem Fenster angeklickt werden kann, sehr gut nachvollziehbar ist. Der Wechsel zwischen Einstellungen und der Simulation geht ruckzuck und ist wirklich eine grosse Hilfe um die Funktionsweise zu verstehen. Ich habe gelernt, wie ich 2 Servos mit einem Knüppel ansteuern, ein Servo umpolen, den Servoweg begrenzen, eine Mischfunktion herstellen und lineare oder exponentielle Funktionen anlegen kann. Und das in rund 30 Minuten herumprobieren... Fazit der heutigen Lernsession: wenn Du interessiert bist, lade Dir Companion herunter, dazu die beiden manuals von helle und probier's aus. Es ist so einfach, dass sogar ICH es verstehe... Viel Spass!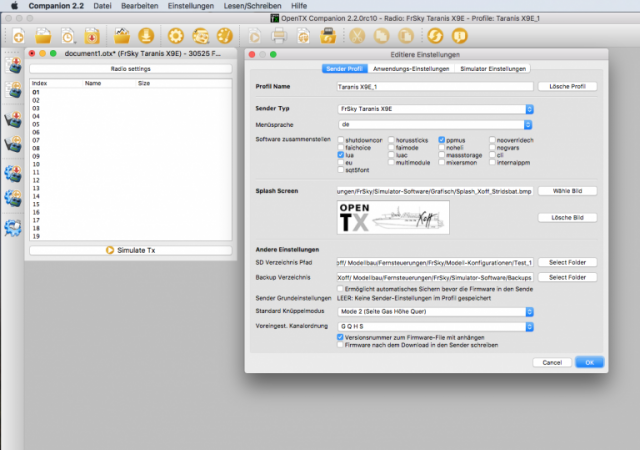
- 6 replies
-
- 2
-

-
- einsteiger
- programmierbeispiel
- (and 3 more)
-
SMX Graupner 3971 an HoTT20 Funktionen aktivieren
Socceroo posted a topic in Sender, Empfänger, Module
Ich bräuche mal einen kompetenen Rat bezüglich folgendem Problem: Gegeben sind Fernsteuerung: Graupner HoTT20 Empfänger: Graupner GR12 Multi Funktionsschaltmodul SXM 3971 (Keine Jumper für L1-L4= Ein/Aus speichernd) Stromversorgung: Hyperpack5000 7,2 Volt NiHM Kanalbelegung: K1 Vorwärts/ Rückwärts, K4 Links/ Rechts und in K5 steckt das Schaltmodul Alle Lampen (Keine LEDs) leuchten bei direktem Anschluß an die Spannungsversorgung, funktionieren also einwandfrei. Ein Defekt der Lampen kann also ausgeschlossen werden. Ein Fehler bei der Verdrahtung kann ich ebenfalls ausschliessen. Aufgabe: An der Fernsteuerung soll der Schalter SW5/6 gemäß Bedienungsanleitung des Schaltbausteines zur Ansteuerung von vier Lichtquellen genutzt werden. Sollverhalten: Ansteuerung der Schaltfunktionen gemäß Bedienungsanleitung (Minus kürzer als ca. 0,75 sec- L1 wird geschaltet, usw) Istverhalten: Bei Betätigen des Schalters SW5/6 wird keine Schaltfunktion aktiviert. Daher meine Vermutung, daß die Fernsteuerung in irgendeiner Weise noch eingestellt werden muß. Schalter und Funktionen zugeordnet werden müssen. Frage an die Runde: Wie macht man das? Was muß ich an der Fernsteuerung einstellen, damit die Lampen wie gewünscht mit diesem Schalter anzusteuern sind? Vielen Dank im Vorraus. -

Rückwärtsgang mit brushless outrunner mit roxxy 940-6sv?!
Guest posted a topic in Servos und Fahrtregler
Liebe Käpt'ns! Und auf die es zutrifft: Herzlichen Glückwunsch zum Vatertag! Ich habe mit einen Antriebsstrang für eine alte runtergekommene Adolph Bermpohl zusammengekauft: 2xBrushless Outrunner 4250 540Kv weitere Motordetails weiter unten 2x roxxy 940-6 sv LiFePo4 10Ah (Headway) Sender DX8 Spektrum Empfänger 6-Kanal Spektrum (Ich weiß: 6-Ch ist für die AB mager, aber ich will erstmal nur Grundfunktionen Jetzt habe ich mal alles zusammengebaut und stelle fest, dass ich nicht auf "Rückwärtsgangtauglichkeit" geachtet habe. Beim Regler ging ich davon aus, dass er vor und zurück hinbekommt. Kann mir jemand hier weiterhelfen (Muss ich ggf. versuchen, die Regler umzutauschen)? Danke schonmal Stefan -
Hallo zusammen, ich möchte eine Kransteuerung programmieren, die darin liegt, das ich erst den Hauptarm in eine bestimmte höhe bringen muss, bevor der Kran gedreht werden kann. Hierzu habe ich mich unter anderem auch mit den logischen Schaltern auseinander gesetzt, aber nichts hinbekommen. Die Drehung, die Anhebung des Hauptarmes und die Seilführung soll über Potis erfolgen = 3 prop Kanäle. Nun hatte ich 3 Poti als Geberschalter definiert (G1-G3), die man auch einstellen kann, auch ab wann Sie schalten. Hier war der Gedanke, das wenn G1 schaltet, ich Poti 2 (G2) benutzen kann. Wäre G1 offen, kann ich zwar Poti 2(G2) am Sender drehen, aber es wird keine Funktion ausgeführt. Soweit war mein Gedanke...... Ist nun G1 offen oder geschlossen, funktioniert trotzdem Poti 2 (G2). Es würde natürlich auch alles ohne die Programmierung funktionieren, möchte aber durch einen Fehler, Schäden vermeiden..... Wenn jemand eine Idee hat, wäre Super, weil ich im Moment den Wald vor lauter Bäumen nicht sehe.... Schöne Grüße Marc
-
Als Genua wird ein vergrößertes, anstelle der normalen Fock gesetztes Vorsegel auf Segelbooten und Segelyachten bezeichnet. Die Genua überlappt im Gegensatz zur Fock den Mast, das heißt, das Schothorn befindet sich hinter dem Mast. (Quelle: Wikipedia) Dadurch beding wird es schwierig mit einer normalen Segelwinde eine Genua zu steuern. Das Programmierbeispiel zeigt eine mögliche Einstellung über zwei Mischer. Dabei steuert Kanal 1 nur die Mischer an. Der Ausgehende Kanal ist 5 (Im Beispiel) Der Mischer ist dabei so programmiert, dass die Seite der Schot gewechselt werde kann, das macht der Umschalter. Auf beides Schalterstellungen ist die Segelposition "gefiert" an der selben Stelle. Damit kann der Mischer auch gleich getestet werden, Wenn bei "gefiert" der Schalter umgelegt wird, darf die Winde sich nicht bewegen. Die Einstellungen werden nur im Menu Gebereinstellungen und Lineramischer vorgenommen. As Sicherheitsgründen sollte beim Ausprobieren die Servowegbegrenzung reduziert werden, damit es euch nicht die Schoten zerreist. Genua Steuerung mit einer Segelwinde.PDF
-

MC32 - Steuerung von drei Antrieben mit Ruderunterstützung
Ümminger Kapitän posted a topic in Graupner
Ich habe mal wieder etwas herumprogrammiert. Rettungs Kreuzer der DGzRS haben meistens drei Antriebe, der mittlere ist meistens der Booster. Zum manövrieren werden die äußeren Antriebe entsprechend gesteuert und unterstützen die Ruderwirkung. Damit dies nich bei "AK" Voraus passiert, ist die Ruderunterstützung ab 40% des Knüppelweges deaktiviert. Dafür setzt ab 40% der Mittelantrieb ein, der nun mit den beiden äußeren Maschinen gereglt wird. Die Einstellungen könnt ihr aus dem PDF entnehmen. Der linke Knüppel steuert längs die Empfängeräusgange 1 und 3 parallel für die äußeren Antriebe. Außerdem hat der Linke Knüppel zwei Geberschalter programmiert, G1 und G2 Bei 40% des Knüppelweges schalten beide. Der rechte Knüppel steuert quer das Ruderservo an Empfängerausgang 2 an. Über LinearMIX 1 und 2 beeinflusst der Knüppel auch die beiden Antriebe zu Ruderunterstützung. Wenn der linke Knüppel weiter als 40% seines Weges betätigt wird, schaltet G2 die Ruderunterstützung ab. Gleichteitig schaltet G1 über LinerMIX4 den Mittelmotor hinzu, der nun mit den beiden Außenmaschinen geregelt werden kann. Kanal 3 ist dabei ein "NurMIX Kanal" Bei Fragen, einfach fragen. Erfolgreiche nachprogrammierungen dürft ihr auch gerne posten. aHarro Koebke14.PDF -
MC 32 - Umschaltung zwischen Schiff und Tochterboot via Phasen
Ümminger Kapitän posted a topic in Graupner
Aus dem Thread mit den drei Antrieben und dem zuschaltbaren Boosterantrieb und der dann deaktivierten Ruderunterstützung entstanden, hier nun die Programmierung von zwei Empfängern, einer im Mutterschiff und einer im Tochterboot. Ich stelle das exemplarisch an einem umgeschalteten Kanal dar. Weitere werden syncron zum Beispiel programmiert. Voraussetzung sind zwei gebundene Empfänger auf einen Speicherplatz. Weiter müssen im Menu "Allgemeine Einstellungen" die Phasennamen vergeben werden. In meinem Beispiel ist das Normal, für das Mutterschiff und Beiboot eben für selbiges. Im Menu "Phasenzuweisung" werden die soeben benannten Phasen einem Schalter zugewiesen. Im Menu "Gebereinstellungen" werden jetzt auch die benannten Phasen angezeigt, je nach dem in welcher Position sich der zugewiesene Schalte befindet. Da der "offizielle" Kanal 1 nicht Phasenabhängig programmiert werden kann, ist dieser bereits in der Phase <Normal> auf Kanal 6 (E6)gemapt. In der Phase <Beiboot> ist der Geber 1 dem E5 zugewiesen. In der "Servoanzeige" kann die Funktion nun auch bereits überprüft werden. In der Phase <Beiboot> sollte sich jetzt Balken 5 Bewegen, in der Phase <Normal> bewegt sich Balken 6. Balken 1 bewegt sich ebenfalls mit, weil - wie oben schon bemerkt - die Einstellung global und nicht phasenabhängig ist. So weit so gut. Jetzt müssen die Empfänger wissen, auf welchen Kanal sie reagieren sollen. Dazu geht es in die "Grundeinstellungen Modell". Dort wird der Cursor auf den Empfänger (BD1)des Mutterschiffs gebracht, also auf die Kennung (z.B. E08) und mit Enter bestätigt. Nun können wir dem Empfängerausgang 1 Mitteilen, dass er auf Senderausgang 6 (E6) reagieren soll. Auf die gleiche Weise wechseln wir jetzt zum Empfänger des Beibootes unter BD2, da steht dann vielleicht E06, und teilen diesem mit, dass sein Ausgang 1 auf Senderausgang 5 reagieren soll. So gehts nun weiter, bis alle Kanäle zugewiesen sind, die umgeschaltet werden sollen. 2Empf-Phasenabh.PDF -
Hier nun die Genuasteuerung mit zwei Winden. Funktionsweise ist, dass wenn die Genua auf der Backbordseite steht, wird sie mit einer Winde gesteuert, die andere ist dabei voll gefiert. Der Dreiwegeschalter lässt beim umschalten in die Mittelstellung nun die Winde mit der Gesteuert wurde voll auffieren, die Genua ist in diesem Moment ungesteuert. Der Schalter in die andere Endposition umgelegt bewirkt, dass nun die zuvor voll gefierte Winde für die Segelmanöver in Betrieb ist, die andere Winde steht in voll aufgefierter Position. Auch hierbei, bitte die Servowege zum Einstellen zunächst stark begrenzen um Beschädigungen an den Schoten zu vermeiden. Auch hier sind die Einstellungen nur in den Menus Gebereinstellungen und Linearmischer vorzunehmen. Die Funktion wird auch bei anderen Sendern einstellbar sein, die über diese beiden Menus verfügen. Genua Steuerung mit zwei Segelwinden.PDF
-
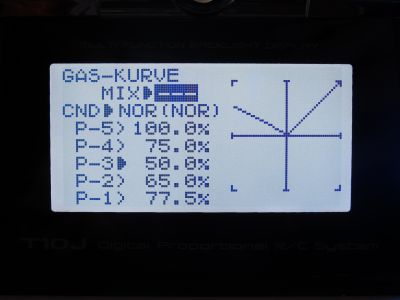
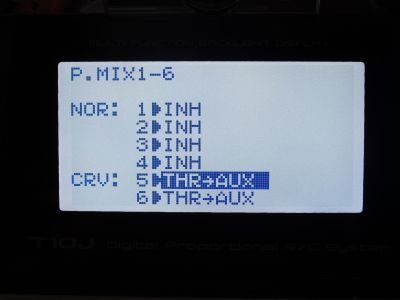
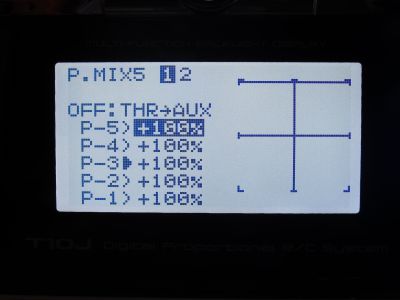
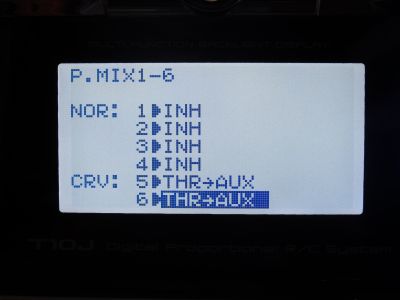
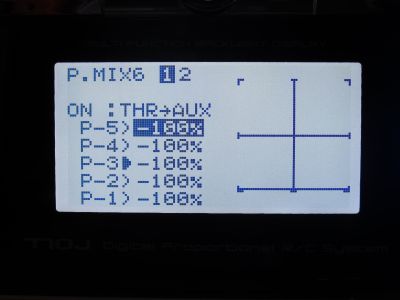
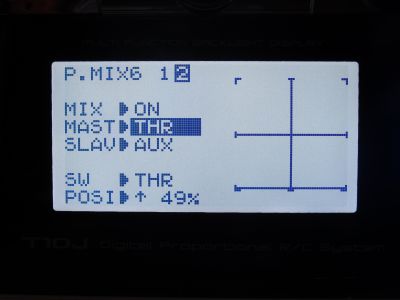
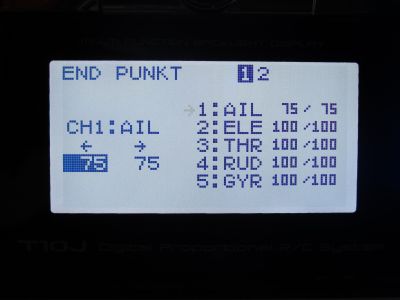
Hallo Zusammen, hier eine kleine Programmieranleitung wie ich meine Futaba T10J programmiert habe, damit die Umkehrklappe (Servo auf Kanal 8) nach unten fährt, sobald ich den linken Fernsteuerungsknüppel (Kanal 3) aus der federzentrierten Mittenposition (50%) nach hinten ziehe. Der Fahrtregler (Kanal 3) bekommt immer noch ein Vorwärtsfahrsignal, allerdings mit Reduktion der Maximalgeschwindigkeit. (Rückwärts ist ja eh nicht so effektiv beim Jet und damit nicht noch die Umkehrklappe "weggeblasen" wird, wenn man eine Notbremsung macht). Die Lenkung, also das Schwenken der Düse liegt auf dem linken Knüppel (Kanal 1) Die Anleitung mag in abgeänderter Form sicher auch für andere progammierbare Fernsteuerungen gelten. Bei meinem Vorgängermodell, einer analogen F14 hab ich noch mit einem Mikroschälterchen und zwei Potis in der Fernsteuerung gearbeitet, zudem musste ich beim Fahrtregler noch zum Lötkolben greifen um zu verhindern, dass der die Drehrichtung ändert, ja das waren noch Zeiten! Also die T10J ist ja eigentlich für Flugmodelle ausgelegt (Heli, Acro, Quadrokopter). Wir lassen sie im Helikopter-Modus. Anpassung der Gaskurve: Was machen: über die Punkte P-1 bis P-5 kann eingestellt werden welches Singal an Kanal 3 für den Fahrtregler anliegt. Gemäss den obigen Einstellungen ist die Geschwindigkeit bei Vorwärtsfahrt Linear und beträgt 100% wenn der Knüppel nach vorne "auf dem Tisch" liegt. Bei "Rückwärtsfahrt" haben wir ebenfalls eine einigermassen Lineare Geschwindigkeitskurve, erreichen aber nur 77.5% der Maximaldrehzahl des Motors. Da alle Punkte positiv sind, dreht der Motor auch bei "Rückwärtsfahrt" in der selben Richtung wie bei "Vorwärtsfahrt". (Falls die Drehrichtung für den Fahrtregler nicht passt, kann im Menüpunkt "Umpolung" das Signal invertiert werden) Nun zur Ansteuerung des Servos für die Umkehrklappe (bei mir auf Kanal 8). Ich "missbrauche" dazu die zwei frei programmierbaren Mischer 5 & 6 und will den Servo entweder zu 100% in die eine Richtung oder zu 100% in die andere Richtung ausschlagen lassen. Die Wegbegrenzung erfolgt später im Menüpunkt "Endpunkt". Auswahl Mixer 5: Was machen: Mixer 5 anwählen Einstellungen Mixer 5, Ebene1: Was machen: Wir stellen bei allen Kurvenpunkten P-1 bis P-5: +100% ein Einstellungen Mixer 5, Ebene 2: Was machen: Wir wählen aus, dass der Mixer als "Master" Kanal 3 (THR: Throttle beim Helikopter, also der Gashebel) nimmt und diesen auf "SLAVE" Kanal 8 "AUX" wirken lässt. "AUX", etwas unschön, bei der T10J heissen alle Kanäle 7 - 10 "AUX" und man muss durch durchzählen Kanal 8 auswählen: Kanäle: 1 - 2 - 3 - 4 - 5 - 6 - 7- 8 - 9 - 10 Kurzbezeichnungen: AIL - ELE - THR - RUD - GYR - PIT - AUX - AUX - AUX - AUX Vielleicht lassen sich die Bezeichnungen in einem anderen Menü abändern, muss ich mal noch untersuchen. Hinter MIX steht noch OFF, das ändert sich auf ON, sobald wir unter SW "Switch" (also die Schaltbedingung) THR "Throttle" (Kanal 3, linker Knüppel) diesen einen Hauch (von 50% auf 49%) nach hintern gezogen haben. Der kleine Pfleil nach unten hinter "POSI" lässt sich mit den "+" und "-" Tasten rechts vom Display umkehren und durch drücken des Joy-Stick-Knopfes wenn wir den Knüppel ganz leicht nach unten aus der Neutralposition gezogen haben (49%) sagen wir dem Mixer, dass er ab dann aktiv sein soll. Das schöne dabei ist, die Anzeige ändert sich live wie man am Knüppel fummelt Ausserdem empfiehlt es sich, zumindest den Umkehrsevo schon mal auf Kanal 8 anzustecken, allerdings noch ohne ihn Mechanisch mit der Klappe zu verbinden, damit er nichts abdrückt wenn er dann voll und eventuell zuerst auch noch in die falsche Richtung ausschlägt Nun kommt das selbe noch für Mixer 6. Mixer 6 auswählen: Mixer 6, Ebene 1: Was machen: Alle Punkte auf -100% einstellen Mixer 6 Ebene 2: Was machen: Wiederum Master ist Kanal 3 "THR" (Throttle, Gasknüppel), Slave "SLAV" ist wieder "AUX" (Kanal 8), als Schaltbedingung "SW" (Switch) wird wiederum der Gasknüppel beigezogen, diesmal allerdings sobald er bei 49% oder grösser (kleiner Pfeil zeigt nach oben) steht. Hier steht jetzt auch hinter "MIX" -> "ON" weil sich der Knüppel bei der Aufnahme in der Mittenposition auf 50% befand. Falls der Servo in die Falsche Richtung ausschlägt, kann man entweder die + / - 100% in den beiden Mischern vertauschen oder die Servo-Polariät im Entsprechnenden Menü Nun passen wir noch die Endpunkte des Umsteuerservos und des Lenkservos an, damit die uns nicht die Anlenkung verbiegen oder gar beschädigen und sich unnötig auf Druck einen abackern und zuviel Strom verbraten. Menü End Punkt Ebene 1: Was machen: Unter Kanal 1 "AIL" begrenzen wir den Lenkservo (bei mir je 75%) Menü End Punkt Ebene 2: Was machen: Unter Kanal 8: AUX begrenzen wir den Umkehrservo (bei mir auf 34% bzw. 49%) Tipp: Hier vor dem Einbau des Servos ganz kleine Werte (10%) eintragen und dann in eingebautem und voll angesteuerten Zustand mit den "+" "-" Tasten die Werte soweit wie nötig erhöhen". Ja, das wärs dann soweit mal in groben Zügen Ich hoffe es war einigermassen Verständlich und dem einen oder anderen als Ideenspender hilfreich. Mit diesen Einstellungen lässt sich der Jet-Antrieb fast wie ein konventioneller Schiffsantrieb fahren. Auch Notbremsungen funktionieren erstaunlich gut gamit. Ich verwende SBUS Servos und hab diese noch etwas getuned, damit sie auch schön schnell reagieren, aber das ist optional. Wer auf eine separat angesteuerte Umkehrklappe schwört, der ignoriert meinen Beitrag hier ganz einfach Grüsse Jetmaster


-
MC32 - VSP Steuerung mit Antriebsregelung
Ümminger Kapitän posted a topic in Sender, Empfänger, Module
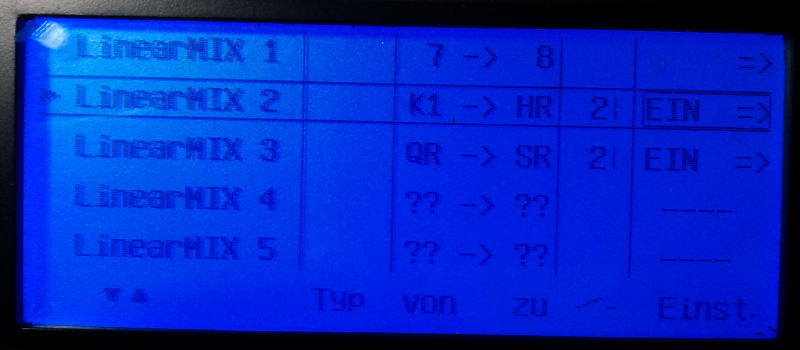
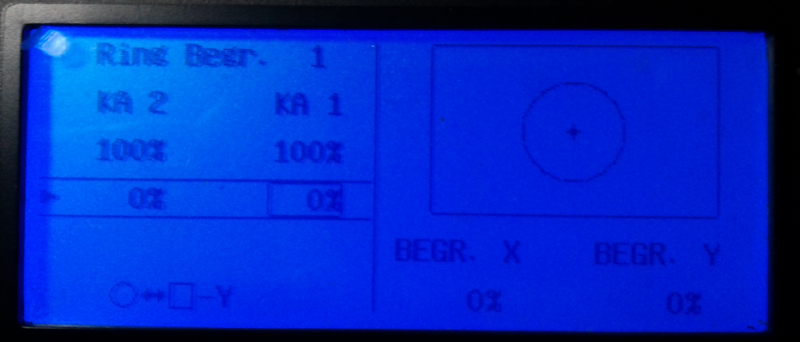
Dann werde ich diesen interessanten neuen Bereich mal eröffnen. In meinem ersten Beispiel möchte ich die Ansteuerung zweier Voith Schneider Antriebe(VSP) Die Antriebe wird können über Linear Mischer auf einen Knüppel gelegt um für die Marschfahrt parallel gesteuert werden. Zum Manövrieren lassen sich die Antriebe trennen und das Modell wird mit zwei Knüppeln manövriert. Die Antriebsdrehzahl für beide Maschinen wird über den seitlichen Hebel (SD2) geregelt. Einstellungen: Grundeinstellung Modell: Steueranordnung 4 Grundsätzlich ist das egal, für die erfolgreiche Nachprogrammierung aber erforderlich. Gebereinstellung: E7 | GL | SD2 --- | 0% | + 100% - 100% | 0.0 0.0 Freie Mischer: LinearMIX1 | | 7 -> 8 | | => | Mixanteil ASY +100% - 100%, Offset 0% LinearMIX2 | | K1 -> HR | 2l | EIN => | Mixanteil ASY +100% - 100%, Offset 0% LinearMIX3 | | QR -> SR | 2l | EIN => | Mixanteil ASY +100% - 100%, Offset 0% Ringegrenzer: 2 1 2 1 EIN | Ringbegr. 1 KA2 100% / 0% KA1 100% / 0% 4 3 4 3 EIN | Ringbegr. 2 KA2 100% / 0% KA1 100% / 0% Empfängerbelegung: Belegung GR24: Steckplatz 1 = Steuerservo Voraus li Steckplatz 2 = Steuerservo Seite li Steckplatz 3 = Steuerservo Voraus re Steckplatz 4 = Steuerservo Seite re Steckplatz 7 = Drehzahlsteller li Steckplatz 8 = Drehzahlsteller re Kommentare und Anregungen, gerne. Weitere Sender wo ihr das erfolgreich einsetzt, für ich gerne hinzu. Bitte daran denken, dies kann nur eine Grundeinstellung sein, die Feinjustierung insbesondere der Servowege und der Begrenzer sind von eurem Modell abhängig.