Search the Community
Showing results for tags 'RC Komponenten'.
-
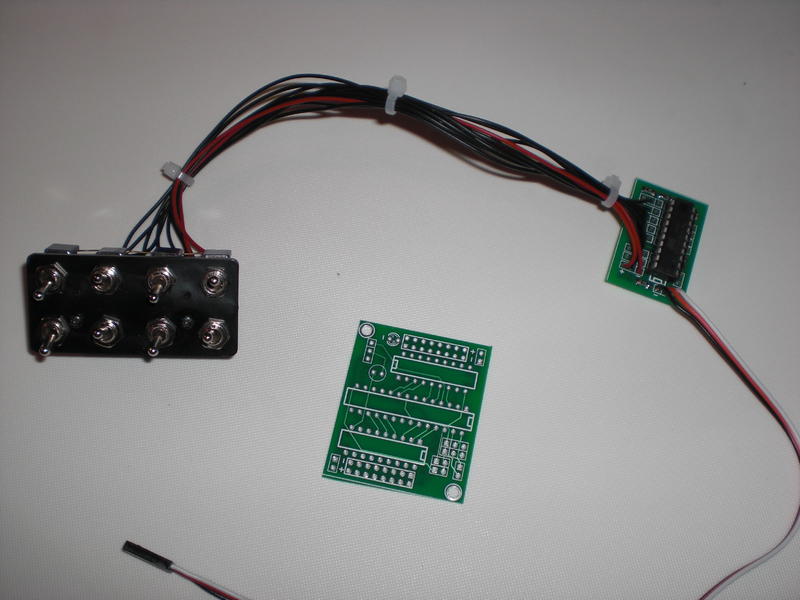
Nachdem ich schon diverse Multiswitche z.B. für meine Dx6i gebaut habe, schwebt mir schon seit längerem die Idee im Kopf einen Multiswitch zu basteln, den man wirklich universell in allen Anlagen benutzen kann und zwar unabhängig davon ob Graupner, Robbe.. bzw. auch 40MHz oder 2,4GHz. Eigentlich ist die Programmierung und auch der Rest schon fertig, leider war meine Lust an elektronischen Basteleien in letzter Zeit etwas begrenzt, bzw. auch der Gesundheit geschuldet. Heute hab ich mich hingesetzt und endlich mal einen Teil des Prototypen zuammengelötet. Ein paar technische Daten, bzw. Vorraussetzungen. - funktioniert mit allen Anlagen die intern mit 3,3V oder 5V und Poti´s arbeiten. - Es wird ein Propkanal benötigt, ggf. wie z.B. bei der Dx6i muss ein Kreuzknüppelpoti für den Eingang herhalten. Das lässt sich aber umschaltbar lösen. - Der Multiswitch muss auch mit Systemen wie FrSky, mit denen normale Multiswitche unabhängig vom nicht vorhandenen Syncsignal nicht zu Mitarbeit zu bewegen sind, funktionieren - 16 Kanäle (es sind aber nur 8 gleichzeitig schaltbar, da jede einzelne Schaltstellung in "Echtzeit" übertragen wird - Die Übertragung habe ich im Vergleich zu meinen alten Multiswitchen ziemlich verändert. Es wird nicht nur ein einzelner Ein-Aus-Impuls übertragen, wenn ein Schalter betätigt wird. Die Schalterstellung aller Schalter wird zyklisch gelesen und übertragen, d.h. Fehlschaltungen oder Störungen neutralisieren sich beim nächsten Zyklus von selber. Deswegen gibt es auch erstmal kein Memory, das ließe sich zwar programmieren, würde das selbstregulierende System aber wieder lahmlegen. - Übertragungszeit für den aktuell geschalteten Schalter sollte nicht deutlich länger dauern, als bei heutigen Multiswitchen. Das hängt leider an diversen Systemen die irgendwelche Einrichtungen im Sender oder Empfänger haben, welche Servozittern verhindern sollen. - Die zyklische Übertragung dauert relativ lange, da ja 16 "Kanäle" übertragen werden müssen. Ich rechne da gerade so mit ca. 1,6s. Das ist aber auf jeden Fall immernoch Faktor 5 schneller als eine Fehlschaltung manuell zu beheben. - Den Dekoder gibt´s erstmal nur als 250mA Version mit ULN Treibern, ganz einfach weil ich nicht mehr brauche, da bin ich Egoist . Aber vielleicht findet sich ja noch jemand, der ein Layout mit FET´s malen will. Die HEX-files, Layout´s... wird es (wenn der Multiswitch fertig ist) hier oder auf meiner HP für jedermann zum download geben. So kann sich dann jeder seinen eigenen UNISWITCH16 (so hab ich das Ding mal getauft) selber bauen. So und nu bin ich offen für weitere Ideen, Anregungen... mal sehen was sich davon noch umsetzen lässt. Soweit der aktuelle Stand, Encoder mit frei verdrahteten Schaltern ist fertig, vom Dekoder gibt´s bisher nur eine Platine.

-
Hallo! Hab mir vor kurzem ein Schaltmodul entwickelt. Ursprünglich hatte ich mittels Taster an der Fernsteuerung mein CTI-Modul angesteuert. Dieses zählt ja die Impulse und schaltet danach einen Kanal. Mein Schaltmodul ist mit 4 Kipptastern ausgerüstet. Somit lassen sich acht Kanäle ohne zählen schalten. Der Pinabstand auf der Platine ist für Graupnereinbau vorgesehen. Es werden lediglich drei Kabel angeschlossen. Plus, Masse und Signalausgang. Ein separater Sync- Eingang ist nicht notwendig. Dadurch ist man nicht an einen bestimmten Hersteller oder Modell gebunden. Ebenso ist eine Verwendung bei 2,4GHz wahrscheinlich möglich. Kann ich aber nicht testen, weil ich keine 2,4GHz Systeme zum testen habe. Da mein Sender voll ausgebaut ist, war kein Modulplatz mehr frei. Das Schaltmodul passt aber über das Knüppelaggregat. Die Verbindung zu den Momenttastern erfolgt hierbei über Kabel. Eingebaut hab ich mein erstes Labormuster. Hat sogar auf Anhieb funktioniert. Dadurch hab ich jetzt einige Platinen übrig. Achso, es müssen keine Prozessoren programmiert werden. Es werden nur normale Bauteile verwendet. Die Schaltmodule von CTI sind auch bekannt und erhältlich. Wer Fragen hat, einfach melden. Gruß Mani



-
Hallo Modellbaufreunde, in diesem Baubericht möchte ich euch zeigen wie meinen Segler Libera Ocean neu aufgebaut habe, wo bei ich sagen muss das bei der Segelwindentechnik mir ein Modellbaufreund geholfen hat, aber dazu später mehr. Bei einem Schaufahren durfte ich mal einen Segler von dem oben genannten Modellbaufreund Segeln und bin dabei mit dem Segelvirus infiziert worden. Von da an war mir klar es muss ein Segler in meine Sammlung. Gesagt getan nach Wochen langen durchsuchen des Auktionshaus E.... fand ich einen, kurz mit dem Modellbaufreund Telefoniert ob der ok ist, da dieser sich schon mehrere Jahr mit Segler beschäftigt. Dann war es soweit August 2011 erstand ich die Libera Ocean für 166,00€ incl. Segelservo und Lenkservo. Ich musste sie zwar in Osnabrück abholen aber bei dem Preis war es mir das wert. So sah sie aus als sie in meine Werft kam. Mir war klar das dieses meine nächste Baustelle war, eigendlich wollte ich sie übern Winter neu aufbauen und Überarbeiten, nur sollte dieses schneller sein als ich mir das Vorgestellt habe. In den darauf folgenden Tagen baute ich meine RC Anlage ein ich wollte ja jetzt das Teilchen so schnell wie möglich im Wasser haben. Die ersten Segelerfahrungen konnte ich mit meinem Segler sammeln was für mich sehr spannend war. Als an einem Sonntag ich hatte mich mit einem Modellbaufreund getroffen das Chaos sein lauf nahm. Mit einmal merkte ich das sich die Segel nicht mehr richtig öffen bzw schliesen liesen. Wir holten ihn an Land und bei genauen betrachten sah ich das die komplette RC einbauplatte los war. Der Vorbesitzer hatte sie mit 5 Min Epoxitharz eingeklebt genauso wie einige andere sachen auch was ich aber erst später sah. Hier mal ein paar Bilder von dem Chaos. Vorsichtig das Deck abnehmen. So sah es im inneren aus was sich ja schon angedeutet hat.
-
Bei meinem kleines Jetboot (NQD Tear Into) mußte ich den Antrieb tauschen. Ich hab dann gleich die Chanche genutzt und einen Jet mit Rückfahrklappe (Graupner Minijet) montiert. Denn Rückwärts fahren kann das Boot so nicht. Und selbst mit Rückfahrklappe ist das nicht ganz einfach. Denn die Klappe wird extra gesteuert und man muss den Antrieb weiter vorwärtslaufen lassen. Dazu ist aber eine 3-Kanal Funke notwendig. Nun ist aber, m.M. nach, eine Pistolensteuerung ideal für das Gefährt. Die hat aber nur 2 Kanäle… So ein Dilemma, man müßte also die Klappe zusammen mit dem Motor steuern können. Das genau macht dieses Programm. Es wird der ESC Kanal vom Empfänger ausgewertet. Bei Vorwärtsfahrt wird der Servo an einen Anschlag gefahren, bei Rückwärtsfahrt wird der Servo automatisch an den anderen Anschlag gefahren und das Motorensignal als Vorwärtssignal ausgegeben. Dazu sind noch folgende Features wichtig: Der Servokanal muss reversible sein, und man muss den Weg einstellen können, am besten man kann die beiden Position direkt per Fernbedienung programmieren. Auch der Motorkanal sollte einstellbar sein, damit man z.B. auch günstigere Flugregler verwenden kann. Der Empfänger wird vom Pin 2 gelesen, die Ausgänge liegen auf Pin 9 (Klappenservo) und 10 (ESC). Am Anschluss 5 wird ein Taster (PRG) gegen Masse angeschlossen. Im Programm gibt es einen Programmiermodus, wenn der Taster PRG beim Einschalten gedrückt wird. Dann können die beiden Positionen des Klappenservos und die minimale und maximale Ansteuerung des ESC's gespeichert werden. Zunächst muss die obere Position gespeichert werden, dazu die Steuerung auf den gewünschten Wert einstellen und PRG drücken. Zur Quittierung blinkt die Board-LED. Danach wird die untere Position angefahren und genauso gespeichert. Jetzt die maximale Stellung des ESC, und danach die Minimalposition. Der Programmiermodus wird dann automatisch verlassen. Die Werte für die Klappe und den ESC werden im EEPROM abgelegt und beim erneuten Start auch wieder gelesen. Die minimale Position steht im EEPROM in der Adresse 0, die maximale Position an Adresse 1. (Es ist dabei völlig egal, welchen Wert die untere bzw. obere Position tatsächlich haben. Unten definiert nur den Rückwärtsbetrieb. Wie der Servo dabei stehen muss, ist völlig egal. Es wird beim Speichern einfach die programmierte Position angefahren. Das gleiche gilt auch für die andere Position.) Adresse 3 enthält den ESC Max Wert und 2 den ESC Min Wert. Weiterhin kann im Programm auch der ESC bei Rückwärtsfahrt auf halbe Leistung geschaltet werden. Dazu dient der Compilerschalter HALF_BACK_THROTTLE. Ich hab das ganze auf einer Lochrasterplatine mit Mega328 aufgebaut. Das Programm kann aber auch auf einem Tiny85 laufen.
-
So, nachdem ich jetzt Arbeitstechnisch etwas mehr Ruhe habe, möchte ich endlich mal das Urprojekt (Das Projekt mit dem die ganze RC Arduino Geschichte anfing) vorstellen. Mein Sohn und ich haben für ihn eine Feuerwehr Dolly gebaut. Mit Pumpe und Blaulich natürlich. Für die Ansteuerung brauchte ich natürlich einen Schalter. Also den 1-Kanalschalter von Conrad bestellt. Der war aber leider schnell kaputt. Also was neues, oder was eigenes. Da ich mich damals gerade mit den Arduinos beschäftigt habe, war es logisch, das Projekt damit zu machen. Aber was genau sollte denn der Schalter tun. Ich hab einen Protortionalkanal frei. Also am besten beide Richtungen dafür nutzen. Nach oben tippen geht das Blaulicht an bzw. aus, nach unten halten startet die Pumpe. Daraus entstand die erste Version des Programms. Mittlerweile hat sich das Programm etwas weiter entwickelt. Es kann nämlcih auch noch blinken, brauch ich aber für das Boot nicht, da ich blaue BlinkLED's eingebaut habe. Im Paket ist alles enthalten was ihr so braucht. Einfach in euren Sketchbook Ordner extrahieren. Darin sind 3 Ordner enthalten. - Feuerwehr, mit dem eigentlichen Programm - libraries, die abhängigen Bibliotheken - hardware Ein Schmankerl ist noch dabei. Hardware beinhaltet zus. Cores für ATTiny Serie. Das PRogramm läuft nämlich auch auf einem ATTiny85. Ich hab dazu auch eine Platine entwickelt. Die wird mit einem ATTiny verwendet. DAnn braucht man nicht den teuren Arduino im Modell versenken. (Soviel erst mal zu dem Thema: "Mit Arduino kann man nur Arduinos programmieren...") Feuerwehr.zip
-
Hallo, nachdem das Auslesen eines RC-Signals klappt, steht jetzt eine sinnvolle Anwendung an. Ich möchte die in meiner FX30 vorhandene Schaltkanal-Funktion auf der Empfängerseite auswerten. Es gibt zwar von robbe/Futaba den dazugehörigen Dekoder, aber da mir niemand sagen konnte, ob dieser auch mit dem 2,4 GHz-System von ACT funktioniert, mache ich das jetzt auf diese Art zu Fuß. Zunächst fange ich bei 40 MHz an; diese Systeme sind meines Wissens alle ähnlich aufgebaut: Nach einem oder zwei Synchonisationspulsen werden die Informationen für die in der Regel 8 Schalt- oder auch Proportionalfunktionen nacheinander übertragen. Ob das auch bei der FX30 so ist, soll das nachfolgende Programm zeigen. Bitte nicht wundern, dass es dann doch zwei Programme sind. Ich habe es einmal mit der schon erwähnten Funktion und ein anderes mal mit den Interrupts gelöst. Weil auf meinem kleinen (2*8 Zeichen) LC Display nicht genug Platz ist, gebe ich die Ergebnisse auf dem Terminal aus. Das hat dann auch noch den Vorteil, dass man diese Werte speichern und in anderen Programmen weiterverarbeiten kann. Hier die Lösung mit der Funktion: '----- Titel ------------------------------------------------------------------- ' Module.......: SchaltkanalStart.bas ' Purpose......: Reads pulses of a Rx channel controled by Tx switch function ' and displays measured values on Bascom's terminal emulation ' To store readings open terminal log file before reading ' Number of reads in constant LoopRead ' Author.......: Jürgen Laakmann ' Version......: 0.1 ' MCU..........: ATmega16 using Pollin evaluation board ' Started......: 17.12.2012 '------------------------------------------------------------------------------- '----- Change History ---------------------------------------------------------- ' dd.mm.yyyy: '------------------------------------------------------------------------------- '----- Function ---------------------------------------------------------------- ' Parameter..: PulseLength ' Return.....: Measured Tx signal pulse length '------------------------------------------------------------------------------- '----- Settings ---------------------------------------------------------------- $regfile = "m16DEF.Dat" $crystal = 1000000 $baud = 4800 $hwstack = 32 $swstack = 10 $framesize = 40 '----- Functions --------------------------------------------------------------- Declare Sub Getpulse(PulseLength As Word ) '----- Constants --------------------------------------------------------------- Const LoopRead = 20 'defines number of RC signal read cycles Const Timer0PreSet = 158 'gives interrupt after 65 ms with prescale=1024 '----- Variables --------------------------------------------------------------- Dim PulseLength As Word Dim PulseNumber(LoopRead) As Word 'stores readings of RC signal Dim PulseError As Byte 'stores errors, given by Timer0 Dim Count As Byte 'used as loop counter '----- Ansteuerung Pollin Evaluation Board ------------------------------------- Dim KeyPressed as Bit ddrd = &B11100000 'PinD5-7 output, PinD0-4 input ' portD = &B11111111 'PullUp PinD0-7 active Key1 Alias Pind.2 Key2 Alias Pind.3 Key3 Alias Pind.4 LED1 Alias Portd.5 LED2 Alias Portd.6 Buzzer Alias Portd.7 '------------------------------------------------------------------------------- '----- Initialization ---------------------------------------------------------- 'RS232-Communikation: I/O-Puffer Config Serialin = Buffered , Size = 20 Config Serialout = Buffered , Size = 20 'LCD configuration Config LCD = 16 * 1 Config Lcdpin = Pin , Db4 = Portb.4 , Db5 = Portb.5 , Db6 = Portb.6 , Db7 = Portb.7 , E = Portb.2 , Rs = Portb.0 Cls Config Pina.0 = Input 'used for RC signal Config Timer0 = Timer , Prescale = 1024 Config Timer1 = Timer , Prescale = 1 LED1 = 0 LED2 = 0 On Timer0 Mispulse For Count = 1 to LoopRead Step 1 PulseNumber(Count) = 0 Next Count PulseError = 0 '===== Program ================================================================= '----- Part 1 ------------------------------------------------------------------ ' Waits until Key1 is pressed Cls Upperline : Lcd "Ready?" Lowerline : Lcd "Press K1" Bitwait Key1 , Set Reset Key1 ' key bounces, re-sets key for next stop point Cls Upperline : Lcd "Running" '----- Part 2 ------------------------------------------------------------------ Enable Timer0 Enable Timer1 Enable Interrupts Timer0 = Timer0PreSet Do For Count = 1 to LoopRead Step 1 Call GetPulse(PulseLength) PulseNumber(Count) = PulseLength Next Count Cls Upperline : Lcd "Done" Lowerline : Lcd "Press K1" Bitwait Key1 , Set Reset Key1 Upperline : Lcd "See term" Lowerline : Lcd "inal " Waitms 500 Print "Gemessene Pulslängen" For Count = 1 to LoopRead Step 1 If Count < 10 Then Print " " ; Count ; ";"; Else Print Count ; ";" ; End If Print PulseNumber(Count) Next Count Upperline : Lcd "New run?" Lowerline : Lcd "Press K1" Bitwait Key1 , set Cls Reset Key1 Upperline : Lcd "Running" Loop '===== End of program ========================================================== End 'end program '----- Subroutines ------------------------------------------------------------- Sub GetPulse(PulseLength As Word) PulseLength = 0 Bitwait Pina.0 , Set Timer1 = 0 Start Timer1 Bitwait Pina.0 , Reset Stop Timer1 PulseLength = Timer1 Timer0 = Timer0PreSet End Sub '----- Interrupts -------------------------------------------------------------- Mispulse: Incr PulseError If PulseError > 10 Then Stop Timer0 LED1 = 1 Waitms 200 PulseError = 0 LED1 = 0 Start Timer0 End If Return Und jetzt die Variante mit den Interrupts '----- Titel ------------------------------------------------------------------- ' Module.......: SchaltkanalStart_Int0.bas ' Purpose......: Reads pulses of a Rx channel controled by Tx switch function ' and displays measured values on Bascom's terminal emulation ' To store readings open terminal log file before reading ' Number of cycles to read in constant LoopRead ' Author.......: Jürgen Laakmann ' Version......: 0.1 ' MCU..........: ATmega16 using Pollin evaluation board ' Bascom.......: V2.0.7.5 '------------------------------------------------------------------------------- '----- Change History ---------------------------------------------------------- ' 27.12.2012 V0.1: Created '------------------------------------------------------------------------------- '----- Function ---------------------------------------------------------------- ' Parameter..: PulseLength ' Return.....: Measured Tx signal pulse length '------------------------------------------------------------------------------- '----- Settings ---------------------------------------------------------------- $regfile = "m16DEF.Dat" $crystal = 1000000 $baud = 4800 $hwstack = 32 $swstack = 10 $framesize = 40 '----- Constants --------------------------------------------------------------- Const LoopRead = 20 'defines number of RC signal read cycles Const Timer0PreSet = 6 'gives interrupt after 255 ms with prescale = 1024 Const ErrorTolerance = 10 'number of errors before showing error condition '----- Variables --------------------------------------------------------------- Dim PulseLength As Word Dim PulseNumber(LoopRead) As Word 'stores readings of RC signal Dim PulseError As Byte 'stores errors, given by Timer0 Dim Count As Byte 'used as loop counter Dim ErrorFlag as Bit Dim RC_Read as Bit RC_In alias Pind.2 '----- Ansteuerung Pollin Evaluation Board ------------------------------------- Dim KeyPressed as Bit ddrd = &B11100000 'PinD5-7 output, PinD0-4 input ' portD = &B11111111 'PullUp PinD0-7 active ' Key1 Alias Pind.2 'used to read RC signal Key2 Alias Pind.3 Key3 Alias Pind.4 LED1 Alias Portd.5 LED2 Alias Portd.6 Buzzer Alias Portd.7 '----- Initialization ---------------------------------------------------------- 'RS232-Communikation: I/O-Puffer Config Serialin = Buffered , Size = 20 Config Serialout = Buffered , Size = 20 'LCD configuration Config LCD = 16 * 1 Config Lcdpin = Pin , Db4 = Portb.4 , Db5 = Portb.5 , Db6 = Portb.6 , Db7 = Portb.7 , E = Portb.2 , Rs = Portb.0 Cls Config int0 = Change 'used for RC signal Config Timer0 = Timer , Prescale = 1024 Stop Timer0 Config Timer1 = Timer , Prescale = 1 Stop timer1 Timer0 = Timer0PreSet On Timer0 Mispulse On INt0 GetPulse For Count = 1 to LoopRead Step 1 PulseNumber(Count) = 0 Next Count PulseError = 0 Reset ErrorFlag Set RC_Read LED1 = 0 : LED2 = 0 'LED's on board off Timer0 = Timer0PreSet timer1 = 0 '===== Program ================================================================= ' Waits until Key2 is pressed Cls Upperline : Lcd "Ready?" Lowerline : Lcd "Press K2" Bitwait Key2 , Set Reset Key2 ' key bounces, re-sets key for next stop point Cls Upperline : Lcd "Running" Enable Timer0 : Enable Timer1 Start timer0 Enable Interrupts Do Count = 1 Enable Int0 While Count <= LoopRead ' PulseNumber(Count) = PulseLength Wend Disable INT0 Cls Upperline : Lcd "Done" Lowerline : Lcd "Press K2" Bitwait Key2 , Set Reset Key2 Upperline : Lcd "See term" Lowerline : Lcd "inal " Waitms 200 Print "Gemessene Pulslängen" For Count = 1 to LoopRead Step 1 If Count < 10 Then Print " " ; Count ; ";"; Else Print Count ; ";" ; End If Print PulseNumber(Count) Next Count Upperline : Lcd "New run?" Lowerline : Lcd "Press K2" Bitwait Key2 , set Cls Reset Key2 Upperline : Lcd "Running" Loop '===== End of program ========================================================== End 'end program '----- Interrupts -------------------------------------------------------------- GetPulse: If RC_Read = 1 then 'AND RC_In = 1 Then 'start Timer1 if positive signal on input Start Timer1 Reset RC_Read Else 'stop Timer1 if no positive signal Stop Timer1 PulseNumber(Count) = Timer1 Set RC_Read Incr Count Timer1 = 0 End If Timer0 = Timer0PreSet Return Mispulse: Set ErrorFlag Incr PulseError If PulseError > ErrorTolerance Then Stop Timer0 LED1 = 1 Waitms 200 LED1 = 0 PulseError = 0 Reset ErrorFlag Start Timer0 End If timer0 = Timer0PreSet Timer1 = 0 Return Die gemessenen Werte habe ich in eine Tabellenkalkulation übertragen http://jl.schiffsmodell.net/SchaltkanalMessung.ods In beiden Fällen gibt es einen Synchonisationsimpuls, dem dann die 8 Werte der einzelnen Kanäle folgen. Erstaunlich finde ich nur, dass die verwendete Messmethodik einen Einfluss hat; beim Lesen mittels Funktion ist der SyncImpuls der längste, beim Lesem mit den Interrupts ist es der kürzeste Messwert. Hat jemand eine Idee, warum das so ist?
-
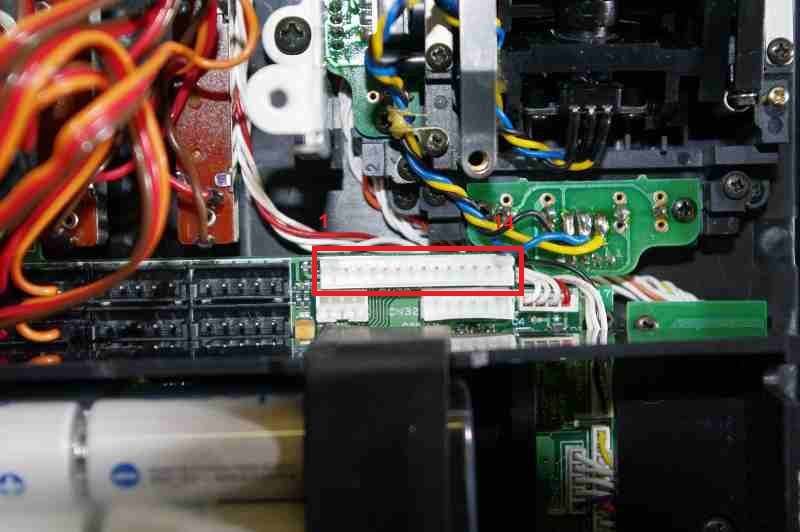
Hallo Leute, ich möchte meine MC19 mit einem Graupner Nautic-Modul ausstatten. Das Problem: die Sync-Leitung (einzelnes Kabel am Modul) muss auf dem 14-pol. Erweiterungsstecker angeschlossen werden, ich weiß aber nicht, auf welchem Pin. Von Graupner gibt es wohl ein Adapterkabel, aber um nur eine einzige Leitung auf den Stecker zu führen, halte ich das für etwas übertrieben... passende Steckverbinder habe ich da. Wäre prima, wenn mal jemand schauen könnte, der diese Kombi schon im Einsatz hat. Bei der MC22 müsste das eigentlich genauso sein. Danke & Grüße Torsten

-
Hallo, Wie schon angesprochen möchte ich hier das Thema "Ardunio im Modellbau" mit der praktischen Anwendung in einem Segelboot darstellen. Auf der einen Seite wird das ein Baubericht, auf der anderen Seite soll hier in einer offenen Diskussion verschiedensten Denkansätze eingebracht werden. Am soll dann ein funktionsfähiges Modell stehen (Die Rumpfschale dazu ist schon im Bau) Also der Aufruf an alle und vor allem die Segler hier sich rege zu beteiligen. PS.: das das Thema softwarelastiger ist habe ich es bei Programme untergebracht.
-
Hallo, Da ich nun auf dem Graupner-HoTT-System umgestiegen bin habe ich mich entschlossen, für den Empfänger ein Wechselhalter zu bauen. Dazu habe ich erst mal den Empfängerschlitten gebaut. Diesen habe ich aus einer 4mm dicken Aluminiumplatte gefräst. Die Seitlichen Aussparungen dienen später zur Befestigung (so eine Art Bajonett-Verschluss) Das große Loch in der hinteren Mitte soll das ganze Teil etwas leichter machen. Und durch den vier kleinen Löchern werden später Kabelbinder gezogen, um den Empfänger fest zu schnallen. Die Platine mit der Stiftleiste ist die spätere Schnittstelle zum Modell, auf der Rückseite werden dann später die Leitungen angelötet, die zum Empfänger führen. So der Schlitten ist fertig, nun muss der eigentlich Halter gebaut werden, davon müssen dann alle Modell, die mit diesem Empfänger betrieben werden soll, einen bekommen. MfG Thandor
-
Hallo Zusammen Da ich mit Servonaut ein RC-System verwende welches teure Empfänger mit sich bringt möchte ich nicht für jedes Modell einen eigenen Empfänger verwenden, zumal ich ohnehin eher selten auf dem Wasser bin. Trotzdem möchte ich nicht jedesmal alle Anschlüsse am Empfänger einzeln umstecken, ist mir zu fummelig und auch zu heikel. Meine Idee wäre es nun jedes Modell und zwei Empfänger (4- und 8 Kanal) mit einer MPX M6 Steckverbindung auszurüsten (Bild) und zwar jeweils 4 Kanäle pro Stecker. + und - können gemeinsam an die beiden äusseren Pole des Steckers geführt werden, die jeweiligen Impulskabel an die 4 inneren. Das müsste meiner Meinung nach eine Stabile Verbindung geben, die problemlos gestöpselt werden kann. Hat jemand ähnliches gemacht oder vielleicht auch noch eine bessere Idee? Danke und schöne Grüsse vom Zürichsee Kaspar

-
Hallo liebe Elektronikbastler, hier nun mein 2. Projekt, was ich gerne vorstellen möchte : Simple Switch V1 Diesmal geht es schon in die Vollen - es wird ein Mikrocontroller verwendet :Beule: Wozu ? Viele der modernen Funken haben auch 1 oder mehrere Schaltkanäle. Diese haben leider keine Neutralstellung (schließt man ein Servo an, fährt dieses von Anschlag eine Seite auf Anschlag andere Seite). Ich war auf der Suche nach einem günstigen 1-Kanal Schalter für eine Wasserpumpe mit Relais. Gekauft habe ich diesen hier von Conrad (LINK). Doch leider liess sich dieser nicht auf die Nullposition des Schalterausgangs einstellen. Wie funktioniert denn das ? Der SimpleSwitch gleicht sich beim Einschalten auf die gerade vorhandene Schalter-Position ab und schaltet dann sobald diese Position sich entweder in die eine oder andere Richtung ändert. Und wie schließt man das an ? Der SimpleSwitch wird an den Empfänger auf dem Kanal angeschlossen, wo der Schalter sein Signal liefert (blöde Formulierung, aber mir viel nichts besseres ein). Am Relais kann man dann entweder den Schließer oder den Öffner wie einen Schalter verwenden. Wie baut man das nach ? Wer den SimpleSwitch gerne nachbauen möchte, findet im Anhang die Eagle Dateien sowie die Firmware für den Controller (Achtung: die Dateien sind in eine Zip-Datei gepackt. Leider nimmt das Forum diese Art von Dateien nicht an. Also bitte die Endung pdf löschen und dann normal öffnen). Wer den Controller nicht selber flashen kann, kann sich bei mir melden. Wir finden dann schon eine Lösung. Die Platine kann man sich recht günstig bei platinenbelichter.de fertigen lassen oder man baut es sich auf Lochraster auf. Das soll's für heute gewesen sein. Wenn noch Fragen sind, dann her damit Gruß Marco Simple Switch V1.zip.pdf
-
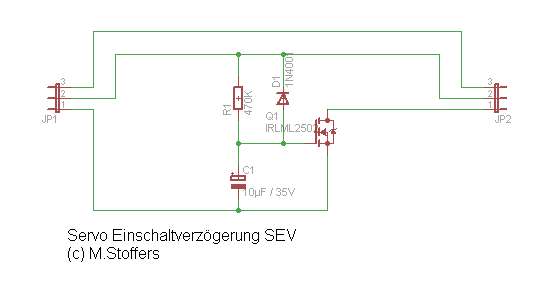
Hallo und guten Abend, wie im Klönsnack schon angedeutet, möchte ich meine Elektronik Bastelleien hier in loser Reihenfolge mal einstellen. Beginnen wollen wir heute mit einer Servo Einschaltverzögerung Wozu ? Nun ja, wir haben im Verein ein paar Sender - Empfänger Kombinationen, die beim Einschalten die Servos zucken lassen. Das ist gerade bei Sonderfunktionen sehr störend. Auch ein paar ältere 2,4GHz Systeme brauchen einfach ihre Zeit, bis das Binding klappt. Die Servos bekommen dann einen fehlerhaften Impuls und fangen an zu zucken. Wie funktioniert denn das ? Eigentlich ganz simple: der Servo wird erst mit 0,5s Verzögerung mit Strom versorgt und reagiert daher nicht auf den fehlerhaften Einschaltimpuls. Wie baut man das nach ? Die Schaltung ist recht simple und braucht nur 4 Bauteile. Über den Widerstand wird der Kondensator langsam aufgeladen, bis der MosFet irgendwann durchschaltet (nach ca. 0,5s). Über die Diode wird der Kondensator wieder entladen, wenn man den Strom abschaltet. Und wie schließt man das an ? Über JP1 wird die Schaltung mit dem Empfänger verbunden und an JP2 wird der Servo angeschlossen. So, die Schaltung habe ich angehängt. Wenn jemand die eagle Dateien dazu haben möchte (ist allerdings in SMD) möge er sich bitte melden. Viel Spaß beim Nachbau Marco [Edit] Schreibfehler korrigiert
-
Über das Thema hatten wir - glaube ich - noch garnicht gesprochen: am ESC lassen sich ja verschiedene Werte für das "Timing" vorprogrammieren (bzw. irgend ein Wert ist da bereits ab Werk eingestellt). Da wir hier einige BL-Einsteiger in unseren Reihen haben, sollten wir da kurz drauf eingehen. Weil man sich mit einem falschen (zu hohen) Timing prima die Motoren kaputt machen kann. Das Timing kann man vergleichen mit alten KFZ-Benzinmotoren, bei denen man noch den Zündzeitpunkt durch Verdrehen der Unterbrecherplatte verstellen konnte (wer erinnert sich nicht an die olle Platte im VW Käfer, an der wir noch mit Fühlermeßlehren rumgefummelt haben? ). Der Zündzeitpunkt wird dort so eingestellt, dass die Zündung bereits ein paar Grad VOR dem oberen Totpunkt des Kolbens erfolgte (Frühzündung). Durch die Masseträgheit der Kolbenbewegung und durch die etwas verzögert einsetzende Explosion des Sprit-Gas-Gemischs erfolgte die Zündwirkung dadurch zum genau richtigen Zeitpunkt. Die Vorverlegung des Zündzeitpunktes bewirkt also eine Leistungssteigerung des Motors. Das ist beim Timing der E-Motoren nicht anders - hier wird statt des Einschalten des "Zündfunkens" der Zeitpunkt der Kommutierung vorverlegt. Bei guten Bürstenmotoren (z.B. Plettenberg) kann man das vordere Lagerschild verdrehen und damit den "Zündzeitpunkt" vorverlegen. Bei den BLs geschieht das - aufgrund der bürstenlosen Kommutierung - bereits im Regler. Genauer gesagt: auf elektronischem Weg per Software. Da sich das Magnetfeld der Spulen erst mit einer gewissen Verzögerung nach Einschalten des Stroms voll aufgebaut hat (die Induktivität der Spule verhindert, dass das Magnetfeld sofort "voll da" ist), wird der Strom etwas "zu früh" auf das nächste Spulenpaar umgeschaltet. Diese Vorverlegung des Einschaltpunktes, genannt "Timing", ist am BL-Regler einstellbar in Werten zwischen min. Null und max. ca. 22-30°. Durch ein schärferes Timing (also Werte über null Grad) lässt sich also die Drehzahl des Motors erhöhen. Der richtige Zeitpunkt (also der richtige Timingwert) ist nicht pauschal vorherzusagen und hängt u.a. auch stark von den Einsatzbedingungen des Modells ab. Denn eine Änderung des Timings hat gleich mehrere Auswirkungen: nicht nur die Drehzahl des Motors steigt, sondern gleichzeitig sinkt auch das Drehmoment und der Gesamtwirkungsgrad. Sprich: der Motor wird schneller heiß. Insofern kann ein zu scharfes Timing bis zur Zerstörung des Motors führen. Ein Wettbewerbsfahrer, bei dem es um die letzte Hundetstelsekunde geht, wird das Risiko eingehen und möglichst hohe Timingwerte einstellen, ein materialschonender Fahrer bleibt bei niedrigen Werten. Das richtige Timing ist ist nicht ganz simpel herauszufinden, denn es hängt u.a. auch maßgeblich von der Anzahl der Pole und Wicklungen sowie von der Drehzahl ab. Ein sechspoliger MEGA stresst zwar den Regler mehr (weil die Drehfrequenz des elektrischen Feldes ein Vielfaches der Motordrehzahl entspricht, der Regler also eine entsprechend höhere Taktfrequenz braucht), lässt sich aber auch deutlich höher timen als ein zweipoliger Noname-Chinese. Grundsätzlich sollte an unseren Schüsseln das Timing möglichst niedrig gewählt werden, damit ein bestmöglicher Wirkungsgrad (hohes Drehmoment, geringe Verlustwärme) erzielt wird. Der Motor läuft damit zwar ein paar Umdrehungen langsamer, aber diese Einstellung ist optimal materialschonend. Ganz grob kann man sagen, dass zweipolige BL-Inrunner zwischen null und 5° getimed werden können, Vierpoler bei 5-10°, Sechspoler bei 7,5-15°. Und genau da liegt die Gefahr: die meisten Regler lassen sich auf Maximalwerte von 22-30° einstellen. Diese Extremwerte sind jedoch ausschliesslich nur für vielpolige Außenläufer gedacht!!! Außenläufer haben typischerweise 14 und mehr Pole. Ein Zweipoler wird bei solchen Extemwerten mit Sicherheit zerstört! Also lasst das Timing am besten auf unteren Werten und nehmt im Zweifelsfall lieber einen anderen Prop ("eine Nummer grösser"), wenn ihr ein bisschen mehr Speed wollt. EDIT: gerade gefunden - ein Interview mit Rainer Hacker (Geschäftsführer von Hacker Motoren) zu diesem und anderen interessanten BL-Themen findet ihr hier.
-
Ersteinmal ein herzliches Hallo, ich habe mich grade angemeldet weil mir seit einigen wochen ein problem die nächte raubt. grade baue ich einen katamaran (Dort das alnDB 68). es soll aber kein detailgenaues modell werden, eher eine plattform für weitere basteleien. dieses soll mit 2 graupner jet-antrieb booster 2 mit umlenk/rückfahrdüsen angetrieben werden. die motoren sind von robbe (inrunner 3650/09) und als regler nehme ich die roxxy brushless control 950-6 . Zur energieversorgung müssen 2x 12v 4000mah conrad 10 zellen herhalten. die funke ist eine graupner mx-12. nun meine frage: kann ich das so machen? [/url] grüße crimp
-
Ich wollte mal was Grundlegendes fragen: Welche Stellkraft benötige ich für ein Ruderservo. Momentan bekommt man ja die Servos für die Shock&Parkflyer beinahe hinterhergeschmissen und schön klein sind sie auch noch. Welche Erfahrungen habt ihr mit dern nötigen Stellkraft, wenn man das so ca. auf bekannte Modelle umsetzt. Nehmen wir mal Graupner: Carina Bugsier 3 Bermpohl Ich glaub diese 3 Abstufungen sind erstmal genug. Welche Stellkraft in kg/cm sind denn mindestens notwendig? Ich gehe davon aus, daß für eine Carina die 1,6kg/cm eines Microservos schon ausreichend sind, wenn diese geeignet sind für Flugmodelle bis 1,4m Spannweite. Was meint ihr, oder hat jemand schon Erfahrung damit? Muß es immer der recht große Standardservo sein? Ich halte den oftmals für überdimensioniert.
-
Hey Leute, ich wollte mal Fragen, geht es eigene Fahrtregler zu bauen? Also für Schiffchen, welche wenns geht ohne µController arbeiten? Weil wenn man so normal kauft kosten die ja schon ein ganz schönes Sümmchen, gut man kann auch gern auf die China Ware zurück greifen, aber wollte einfach mal nachfragen, vielleicht hat ja jemand von euch schon mal sowas gebaut? Michael
-
Moin zusammen ! Anbei möchte ich meine Recherchen zu Änderungen an Servos zusammenfassen. Ergänzungen und Korrekturen sind erwünscht, vielleicht ist das Endprodukt ein Artikel, der das Grundwissen zu diesem Thema gut verständlich zusammenfasst. EINLEITUNG Servos sind spannende Bastelobjekte, weil ein Motor, ein Getriebe und eine Elektronik zusammen im passenden Gehäuse für wenig Geld gekauft werden können. Außerdem gibt es unzählige Abmessungen, verschiedene Drehmomente und Ausstattungen. Wenn man allerdings etwas anderes möchte als schnell nach links 40° - schnell nach rechts 40°,dann wird es schon schwieriger. Aber dafür sind wir ja Modellbauer. INNENLEBEN EINES SERVOS Die meisten Servos sind folgendermaßen aufgebaut: Der Motor bewegt über ein Getriebe den Ruderhebel. Das Potentiometer ist an die Achse dieses Ruderhebels gekoppelt und gibt eine Rückmeldung über die Hebelposition an die Elektronik. Über die drei Adern des Kabels kommen Gleichstrom (+ und -) und das Steuersignal zur Elektronik. Für die Steckerbelegung und Kabelfarben haben die Hersteller unterschiedliche Systeme (Grafik dazu), mittels Adapter oder Umlöten sind die Servos aber an unterschiedlichen Empfängern nutzbar. Servos für höhere Beanspruchung sind mit einem Metallgetriebe und Kugellager ausgestattet. SERVOSTEUERUNG Vom Empfänger bekommt das Servo alle 20 Millisekunden ein Signal. Die Länge dieses Signals gibt die Soll-Position für den Servo an: kurzes Signal (1 Millisekunde) = Endstellung (z.B. links) mitteres Signal (1,5 Millisekunden) = Mittelstellung langes Signal (2 Millisekunden) = andere Endstellung (z.B. rechts) Auf der Seite Electronicsplanet.ch gibt es dazu eine sehr anschauliche Grafik. Die Servoelektronik vergleicht diese Soll-Position mit der Ist-Position, die über das Potentiometer zurückgemeldet wird. Wenn beide nicht übereinstimmen, bekommt der Motor solange Strom, bis die gewünschte Position erreicht ist: Bei Digitalservos erfolgt diese Regelung schneller und exakter. Dadurch ist eine höhere Haltekraft möglich, allerdings auch ein höherer Stromverbrauch. MODIFIKATION DER SERVOEIGENSCHAFTEN Damit mein Servo mehr kann als das oben beschriebene Standartverhalten (40° in jede Richtung), gibt es verschiedene Möglichkeiten: Einstellungen oder Programmierung in der Fernsteuerung (Z.B. Servoweg, Drehrichtung) Programmierung im Empfänger Module, die zwischen Empfänger und Servo gesteckt werden (Z.B. Für Geschwindigkeit, Drehwinkel) Programmierung von Digitalservos (Winkel, Geschwindigkeit... ) Solche Servos sind mittlerweile bezahlbar (Hyperion 35€, USB-Adapter 15€ oder Programmierung durch den Händler) Hebel, Getriebe oder Seilscheiben, die vom Servo angetrieben werden können auch oft weiterhelfen. Am Servo rumbasteln, auch „Servohacking“ genannt. Vielleicht die brutalste Methode, macht aber Spaß. Weiter im zweiten Teil.
-
Hallo, ich habe hier durch Zufall mal einen Artikel gefunden in dem erklärt wird wie man normale Servos auf größere Drehwinkel umbauen kann: http://www.rc-flieger.net/pages/tippstricks/180deg-servo.php Detlef
-
vth: Brushless- Motoren und -Regler Quelle: VTH Verlag Grundlagen - Technik - Praxis Autor: Roland Büchi 1. Auflage ISBN: 978-3-88180-427-1 Aus dem Inhalt: Unterschied zwischen Brushed- und Brushless-Motor Funktionsweise des Brushless-Motors Sternbewicklung und Dreieckbewicklung Kennzahlen des Brushless-Motors Brushless-DC-Regler Maximalstrom, Strommessung und Temperaturmessung Die BEC-Spannung Mikrocontroller und Programmierung Propeller beim Modellflugzeug Pitchgesteuerte Modellhubschrauber Schiffsschrauben Tabellenhilfe für den Kaufentscheid Praxistipps für den Motoreinbau und die Verkabelung Test von verschiedenen Antriebskombinationen Masseschluss, Windungsschluss, Kurzschluss Der Autor beschreibt die Unterschiede zu Bürsten- und bürstenlosen Motoren, sowie die Unterschieder zwischen innen- und Außenläufern sehr detailiert. Ebenso die Funktionsweise der BL Motore im Verbund mit dem Controller. Für den einfachen Anwender mag der mit Formeln gespickte Text etwas langatmig wirken, wer sich mit der Materie eingehender beschäftigen möchte, findet hier eine Grundlage. Für den einfachen Anwender wie mich, ist die Erkenntnis, dass ein mehrpoliger Außenläufer mit seinem Controller schon eine Untersetzung darstellt, durch eine durch drei teilbare Ganzzahl. Die Kennzahlen, die wir aus Katalogen und Prospekten kennen, wie z.B. kV oder Timing werden eingehend und auch für den einfachen Anwender verständlich erläutert, wie auch deren Verhältnis zu den anderen Kennzahlen, wie Drehzahl, Strom und Drehmoment. Weiter bietet das Buch einige Formeln zur Berechnung des Antriebes wie auch eine Hilfe zur Fehlersuche. Die Praxistipps für Einbau und Verkabelung waren alte Bekannte, all diese Dinge wie, ausreichender Kabelquerschnitt, entsprechende Stecker usw. sind bereits aus Zeiten der Bürstenmotoren bekannt. Fazit: Für jeden der sich mit dem Thema Bürstenlose Antriebe beschäftigen möchte, um einfach nur das Prinzip verstehen zu wollen, oder sich tiefer mit der Materie zu beschäftigen, ist dieses Buch eine Empfehlung.

-
Ich suche eine gute Segelwinde fuer meine Aero. Da ich ohne Umlaufschot segeln moechte brauche ich eine Winde die ich im direkt Betrieb einsetzen kann. Die Winde wuerde das Grossegel steuern Hat jemand Erfahrung mit der Segelwinde 4
-

Robbefahrtregler Robbe FR 500 mit JR-Stecker versehen
Guest posted a topic in Servos und Fahrtregler
Hallo Zusammen, bin neu hier im Forum und habe keine Ahnung. Habe in meiner neuen Wohnung zwei Schiffsmodelle gefunden, die z.T. schon mit Technik bestückt waren (Motoryacht Robbe Marauber fast komplett fertig; Seenotrettungskreuzer Adolf Bermpohl als Bausatz nur mit Motoren bestückt.). Da ich noch keine Erfahrungen mit diesem Hobbey habe und noch nicht weiß, ob es mir Spaß macht, will ich versuchen die Boote möglichst günstig zum Laufen zu bringen. Habe nun zu Weihnachten eine Carson-Steuerung mit Empfänger (für JR-Anschlüsse) bekommen. Im Boot ist ein Robbe Fahrtregler FR 500 mit Umpolung und Speedkontakt. Wie kann ich diesen auf JR-Stecker umrüsten? Welche Farben werden verbunden bzw. kommen auf welchen Steckkontakt? Würd´mich sehr über Eure Hilfe freuen. Danke. Gruß Thorsten -
Da ich in der Vergangenheit oft die Frage gestellt bekommen habe, wie man die Drehrichtung von Servos auch ohne einen Computersender ändern kann und ich letztens meine F14 auf 2,4GHz umgerüstet habe und gleich auf "Servo-Reverse" umgerüstet habe, versuche ich hier mal eine Umbauanleitung zu schreiben. Ich hoffe sie ist allgemein verständlich. Fragen können im gesonderten Kommentar-Thread gestellt werden. Was ist "Servo-Reverse" und wozu brauche ich das? Servo-Reverse bedeutet nichts weiter, als die Drehrichtung des Servos um zudrehen. Je nach Einbauart des Servos oder nach Servohersteller dreht der Servo nicht in die Richtung die man von der Steuerknüppelbewegung erwarten würde. Bestes Beispiel: Bei meinen Seglern "Spered Avel" und "Ghostwind" laufen die Servos genau entgegengesetzt: Spered Avel: Steuerknüppel zu mir hin => Segel wird heran gezogen (dichtgeholt) Gohstwind: Steuerknüppel zu mir hin => Segel wird (durch den Wind) vom Bot weg bewegt (gefiert) Bei einem weiteren Boot funktioniert das Ruder genau gegenläufig zu allen anderen meiner Boote. Da sind Havarien vorprogrammiert! Wie kann man sich helfen? Ganz einfach: Einfach den Sender öffnen und den Stecker vom entsprechenden Steuerknüppel umdrehen! Originalzustand: Und umgedreht: Wo findet man die Stecker in der F14? Hier: Nun ist es mir zu aufwendig, jedes mal, wenn ich das Modell wechsele, die Funke auf machen, Stecker drehen und funke wieder zu machen. Abhilfe würde ein Computersender machen, wo man das per Menü und Knopfdruck macht. Aber es gibt auch eine Lösung für Nicht-Computer-Sender wie meine geliebte alte F14: Einfache Umschalter! Einfach? STOPP! Es sollten eben nicht einfache sein! Um ein versehentliches Umschalten während des Betriebes zu verhindern, sollten sie unbedingt verriegelbar sein!! Man findet sie bei diversen Elektonikanbietern im Internet. Ich habe meine von Eder Modelltechnik bezogen, da die Qualität der Schalter hervorragend ist und deutlich billiger als zu Beispiel bei Conrad. So sehen die aus und sind auch im Umbaubericht FC-16 B&T / F14-Navy auf 2,4GHz EZC-Universalmodul zu finden: Wird Fortgesetzt! Kommentare bitte hier!
-

Kommentare zum Umbaubericht robbe F14 auf Servo-Reverse
Arno Hagen posted a topic in Comments to Building reports: Ships
Hier gerne Anregungen, Kritik, Kommentare zum Umbaubericht robbe F14 auf Servo-Reverse! -
Hallo miteinander Die Frage nach der richtigen Fernsteuerung hat sich (bei mir) geklärt. Ich werde mir sobald sie erhältlich ist eine mc-32 kaufen. Graupner hat auf de Webseite die Bedienungsanleitung veröffentlicht http://www.graupner.de/mediaroot/files/33032_mc32_HoTT_DE.1.pdf Seite 246 Multikanal mit freizuordbaren Schaltern und Gebern! Seite 250 Ring Begrenzer Ideal für den VSP in meiner Parat:that: :hahaha:Seite 254 Sogar ein MP3 Player ist eingebaut. Gruss Martin
-
Hallo zusammen, ich habe gerade eine Seabex One erstanden und möchte gerne den Kran ansteuern sowie einige Zusatzfunktionen. Nun das Problem: Ich hab keine Ahnung von der Steuertechnik. Bisher reichte bei meinen Modellen meine DX6i von Spectrum aus. In meiner Werft habe ich noch ein Graupner 4014 Modulsystem liegen ( Erbstück). Es sieht so aus, als wenn man an dem System noch mehrere Schalter montieren könnte ? Im Boot steckt ein 16 Kanal Empfänger sowie ein 2-16 K Nautic Expert Schalterbaustein / beide von Graupner. Gibt es die Möglichkeit die Funktionen mit meiner Funke zu steuern ? Vielen Dank für alle Zuschriften im vorraus. Gruß Sven