All Activity
- Today
-

Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
JojoElbe replied to ThomasI's topic in Comments to Building reports: Ships
wo ist dein Lautsprecher? kann man den unter Deck packen? Der Motor hört sich an, als wenn der Motorraum offen ist. Irgenwie müsste man die Höhen wegbekommen. (beim Auto geht's ja nach unten raus, beim Boot ist der Motor aber meist abgeschottet...) Ansonsten nette Elektronik 'Spielereien' . J -

GRACIA von Graupner - Rundspant-Modellsegeljacht, Original-Bausatz von 1964 heute wiederbelebt ?
ArchIgl_X replied to ArchIgl_X's topic in Building reports: Ships
Jetzt bin ich ein Stück weiter und somit müsste auch die Passung der Kajütplicht gewährleistet werden. Die Anprobe des vorderen und des hinteren Decks zeigt keine ungelösten Ecken auf. Die Plichtrückwand kann relativ unproblematisch angeklebt werden, trotzdem zeigen sich an dem Bauteil leichte Verwindungen, die im Zaum gehalten werden müssen. Die Seitenwände dazu sind kritischer, was heisst, dass sie mir wie "Graupners extrabreite Nudeln" vorkommen, ihre Bändigung könnte interessant werden. Wichtig ist es mit den unverdächtigsten Teilen = möglichst wenig verzogenen, anzufangen, weil sich sonst beim Aufbauen die Fehler multiplizieren können. Man könnte jetzt überlegen, ob man nicht Hilfslehren bauen müsste um Rechtwinkligkeiten für das Verleimen zu erzwingen, ich habe jedoch eine Art Wäscheklammern/Gummiringe-Mobilé ausprobiert, was aber ziemlich viel Nerven und Geduld erfordert. Nachts kann man dann nicht richtig schlafen, weil man den Verdacht hat, dass das alles am nächsten Tag vielleicht nichts wird. Es war schon recht merkwürdig in der Umsetzung, hat dann aber geklappt. Naja, mit zusätzlichen Bauteilen und den Decks sieht das allmählich schon ganz passabel aus.







-
Bausatz Gracia von 1964, die Bändigung der "Nudelplicht"
Images added to a gallery album owned by ArchIgl_X in Construction report
-
-

ungenügende Kesselleistung bei einem Siederohrkessel
Thom Schönberger replied to Thom Schönberger's topic in Dampf
Nur so viel im Moment, der Regnerkessel in einem Haferl Warmwasser, erfüllt seinen Zweck bestens und bringt genug Dampf die Neptunsatt schnurren zu lassen. Der Große Kessel ist leider ein Flop, bei einer Druckprobe erwiesen sich sämtliche Schraubverbindungen als undicht. Da steckt noch Arbeit drin. Wenn ich den Rumpf für den Schlepper soweit fertig habe, werde ich die Dampfanlage einbauen und eine Testfahrt unternehmen. Davon berichte ich dann . -
Für meine Dampfbarkasse, 8 Kg ohne Kesselfüllung, bildete ich mir eine Transporteinheit ein, welche das schwere Boot auch auf längeren Wegen zum Wasser bequem befördern sollte. Für eine Colin Archer, etwa gleiches Gewicht, habe ich kurzerhand eine klappbare Sackkarre als Transportwagen umfunktioniert. Den Bootsständer auf die Sackauflage geschraubt, das Boot draufgestellt und so sind auch lange Wege auf unebenem Grund kein Problem. Als ich diese Methode beim Dampfboot anwenden wollte, musste ich schnell feststellen, dass Vollgummireifen und Dampfbarkasse nicht zusammen passen. Durch die entstehenden Vibrationen nahm das Boot schon nach wenigen Metern Schaden. Die Sackkarre auf Luftbereifung umrüsten ist wegen des Klappmechanismus ein ziemlicher Aufwand. Ein Segeldingi befördere ich schon länger auf einem Hänger zum Wasser und das Gespann ist auch hübsch anzusehen. So wollte ich auch mit dem Dampfboot verfahren. Als Zugmaschine wählte ich einen Unimog von Amewi, im Maßstab 1:10, passend zum Bootsmaßstab. Das Fahrzeug ist scale und mit 6 Kg Eigengewicht zum Ziehen größerer Lasten geeignet. Dachte ich wenigstens. Bereits bei der ersten Testfahrt brannte der verbaute Motor durch. Da ich im Innenraum bereits Veränderungen vorgenommen hatte ( beleuchtete Instrumente und Ledersitze, sowie Sicherheitsgurte ) wollte ich das Fahrzeug nicht als Ganzes einschicken, sondern baute das Getriebe mit dem Motor aus und schickte diesen zum Ersetzen ein. Die Crawlerspezialisten in unserem Verein rieten mir zum Verbau eines Quickrun Combos 2300 Kv in den Unimog. Dieser Umbau hat sich mehr als gelohnt. Leider stellte sich dann noch heraus, dass die Differenzialsperre der Vorderachse nicht funktionieret. Der Bowdenzug war nicht richtig eingebaut, um dieses Übel zu beheben musste die Vorderachse und das halbe Chassis zerlegt werden. Seither kenne ich den Unimog in und auswendig. Nach Beheben weiterer Elektronikmängel läuft der Montagsmog jetzt zufriedenstellend. Leider kann man den Preis für diese vielen Material und Montagemängel nicht als gerechtfertigt betrachten. Im zweiten Teil möchte ich den Trailerbau beschreiben. Um


-
- 1
-

-
Mit dem letzten Beitrag habe ich nun die geplanten Teile meines Bauberichtes abgeschlossen. Damit wie versprochen zu der Frage: Ja wie sieht das denn jetzt im Ergebnis aus? Hier mein Funktions-Demo unter „Laborbedingungen“. Schöne Filmaufnahmen beim Fahren muss ich erst noch machen, aber werden sicher folgen. Fazit Alles in allem ist es ein nettes Show-Boot geworden. Es war eine interessante Erfahrung mit dem Werkstoff Holz zu arbeiten, auch wenn ich einige „Abkürzungen“ genommen habe und Anfängerprobleme an allen Ecken sehe. Dennoch stelle ich fest, dass die ungewöhnlichen Funktionen schon den einen oder anderen staunenden Blick ausgelöst haben. Ich habe aktuell keine weiteren Themen zum Modell mehr vorbereitet. Aber ich freue mich auf Interessierte Rückfragen und werde die je nachdem im Kommentar-Forum beantworten, oder vielleicht ergibt sich ja ein neues Thema daraus. https://www.schiffsmodell.net/index.php?/forums/topic/21254-kommentare-zu-baubericht-„vaporetto-actv-42“-128/
-
Wie werden die Sonderfunktionen gesteuert – oder „jetzt wird C++ompliziert“ Die Arduino Programmierung basiert auf einem C++ Code. Vorteil: fast alles ist möglich. Nachteil: C++ Aber wenn man den Dreh mal raus hat, dann macht es sogar richtig Spaß, dem Boot immer neue Funktionen zu verpassen. Prinzipiell läuft die Logik der 4 Kanäle so ab: Ruder und Antrieb klassisch auf Kanal 1 & 2 – diese beiden Kanäle werden über eine zentrale Signalverteilung auch an den Arduino weitergegeben. Kanal 3 & 4 gehen direkt in den Arduino. Kanal 3 ist dabei als „Modus-Auswahl“ ausgelegt – aktuell drei. Mit einem Potentiometer Hebel wird der Modus vorgewählt – der Hebel an meiner Fernbedienung hat praktischerweise drei Einrast-Positionen. Kanal 4 ist ein Taster der entsprechend dem Modus diverse Funktionen schaltet. Dabei unterscheiden sich lange und kurze Klicks. Modus 1 AUDIO: in diesem Modus schaltet ein kurzer Klick die nächste Stationsdurchsage (geht auch automatisch nach 20 Sekunden fahrt) Ein langer Klick löst das Boots-Horn aus (inklusive italienischen Schimpfereien wenn das Horn lange genug gehalten wird) Modus 2 LICHT: in diesem Modus werden die verschiedenen Beleuchtungsszenarien geschaltet. Kurz geht vorwärts, lang schaltet rückwärts. Modus 3 MENÜ: hier wird mit dem Taster durch verschiedene Setup-Einstellungen gewechselt (die auch akustisch angesagt werden) aktuell Boots-Trimmung, Licht Dimmung, Lautstärke. Mit dem Steuerruder wird der aktuelle Wert verstellt. Das Ruder schwenkt dabei zwar mit – aber egal. Die Durchsagen Ja, dieses Boot hat einen viel beschäftigten MP3 Player verbaut. Der Arduino kann zu jedem Zeitpunkt ein passendes Sample abrufen. Und in der Hauptsache sind das Durchsagen, die einigermaßen meinen Erinnerungen folgen. Ich wollte die Durchsagen glaubhaft aber nicht todernst gestalten. Ich glaube mich an eine weibliche Stimme zu erinnern, die alle Ansagen in Italienisch und English machte. Ich habe die Ansagen in Englisch geschrieben und per Google ins Italienische übersetzt – in der Hoffnung, dass nicht zu viel Unsinn heraus kommt. Die Ergebnisse habe ich mit einer professionellen Italienischen KI Stimme „sprechen“ lassen. Damit erhalten auch die englischen Elemente einen passenden italienischen Akzent. Wer Englisch oder Italienisch versteht sollte das eine oder andere Mal schmunzeln müssen: So wird zum Beispiel 20 Sekunden nachdem die Fernbedienung abgeschaltet wurde ein Boots-Alarm wegen Verlust der Steuerungskontrolle ausgerufen. Fahrgäste werden aufgefordert sich eine Rettungsweste zu schnappen und über Bord zu springen. Gleichzeitig wird höflich darauf hingewiesen, dass Schwimmen in den Kanälen mit €50.- bis €200.- bestraft wird (das ist tatsächlich so) Und das Bootshorn ist nicht nur eine Hupe: wie beschrieben flucht der Fahrer auf Italienisch vor sich hin, während er hupend im Verkehr feststeckt. Motor anlassen und abstellen Wie schon erklärt verwende ich ein ganz einfaches Diesel „NoName“ Soundmodul, und habe bei diesem sogar eine nicht dokumentierte Funktion gefunden. Ich habe die Platine inzwischen noch mal angesehen und folgenden Aufdruck entdeckt „PayneRC Ver 2“. Auf der Platine waren die Zuleitungen auf einem Lötpad mit der Bezeichnung „1“ verbunden. Daneben war ein „2“ ohne jeder Verbindung. Siehe da: ein PWM Signal an „2“ schaltet den Sound ein/aus. Aber eben auch nur das. Kein Anlasser-Geräusch, kein Auslaufen. Aber wozu habe ich einen MP3 Player an Bord!? Ich habe nach entsprechen Tönen gesucht und ein Anlassen und Auslaufen gefunden, das recht gut zu dem Soundmodul Motor passt. Nun ist es also ein Job für zwei: Beim Anlassen ruft der Arduino zuerst das Sample des Motor-Anlassens am MP3 Player auf. Zwei Sekunden später aktiviert er das Soundmodul. Das MP3 Sample ist so gestaltet, dass es nach hinten leiser wird… und das Soundmodul übernimmt fließend. Nach 30 Sekunden im Leerlauf schaltet der Arduino das Soundmodul wieder ab. Praktisch zeitgleich wird das Sample des auslaufenden Motors am MP3 Player abgerufen. Der Übergang ist nahtlos. Zwei Soundquellen – Lösung von Eleganz bis Grobschlächtig. Fakt: es gibt in dem Boot zwei Soundquellen. Davon hat der MP3 Player einen Line-Ausgang und einen 3W Lautsprecher Ausgang. Das Soundmodul hat NUR einen Lautsprecher Ausgang. Die elegante Lösung wäre nun, sich eine Mischer-Schaltung zu löten die mit den Lautsprecher Pegeln umgehen kann, und das Ergebnis der Mischung mit einen Verstärker an einen einzelnen zentralen Lautsprecher zu senden. Elegant eben! Ok, ich gebe es zu, ich habe in dem Fall eine grobschlächtige Abkürzung genommen und einfach zwei Lautsprecher verbaut – je einen pro Quelle. Nicht nur, dass mir die Löterei zu blöd war. Audio Komponenten zu basteln birgt immer die Gefahr, dass das Ergebnissignal nicht sauber ist. Und das wäre den Aufwand nicht wert. Außerdem sind die Lautsprecher so klein, dass vermutlich eine Mischer/Verstärker Platine mehr Platz verbracht hätte. Elegant ist es nicht… aber… na ja… hmmm… eigentlich… wie war noch mal das Schaltschema für einen Summen-Mischer? … https://www.schiffsmodell.net/index.php?/forums/topic/21254-kommentare-zu-baubericht-„vaporetto-actv-42“-128/

- Yesterday
-
GRACIA von Graupner - Rundspant-Modellsegeljacht, Original-Bausatz von 1964 heute wiederbelebt ?
ArchIgl_X replied to ArchIgl_X's topic in Building reports: Ships
***************************************************************************** So, wie ist das jetzt mit meiner weiteren Planung = Vorgehensweise ? Epoxy/Glasfaserbeschichtung anzugehen hat keinen Sinn, solange ich die verflixte Kajüte nicht von der Helling heruntermanipuliert habe. Die allerletzten Teile, die evtl. noch etwas Aussteifung der Kajüte erzeugen könnten sind angebracht. Die Wahl der Waffen ("Hackebeilchen") ist fraglich, Skalpell, Spachtel und Taschenmesser zeigten nur ganz mässige Wirkung. Lokale Vorarbeit mit dem Skalpell (= Einkerbung) erlaubte es dem brutalen Schraubendreher eine Hebelwirkung unter dem Kabinenrahmen zu erzeugen (Natürlich an gut überlegten Punkten, damit nicht mit der Hebelwirkung fragiles Sperrholz entschieden geschädigt würde). So, ohne Mut geht garnichts. Es war anzunehmen, dass etwas Klebstoff und Grundierung an Klebestellen durchgesickert sein könnte und den Kabinen- rahmen unkontrollierterweise fixiert haben könnte. Entweder es klappt oder ich habe eine Kabinenruine (="gehe zurück auf Null"). Mögen Catweazle und Kröte Kylwalda mit mir sein ! Ein heftiges Knirschen und Krachen und schauschau, der Kabinenrahmen hat sich von der Helling lösen lassen. Es sieht nach Kollateralschäden aus, diese sind aber aushaltbar und kein Totalschaden. Blitzschnell müssen Teilbruchstücke wiedereingesetzt werden und Helling- reste vom Kabinenrahmen entfernt werden. Auf der Helling sind noch heftige Auseinandersetzungsspuren zu sehen. Ganz erstaunlich ist, dass der Kajütrahmen absolut plan ist und alles im Lot ist. Meine Übervorsicht betreffend Aussteifung der Kajüte scheint sich gelohnt zu haben. Noch erstaunlicher ist, das die Kajüte im saugenden Passsitz in den Rumpfrahmen passt, ich muss wohl betreffs Lackaufträgen auf der Kajütenaussenhaut sehr vorsichtig sein. Dennoch sind noch "Verwundungen" noch sichtbar und müssen behandelt werden. Die Passzustände scheinen im Augenblick sehr erfreulichzu sein. Jetzt muss aber die noch nicht ganz zusammengefügte Plicht da noch hinein














-
Bausatz Gracia von 1964 vor Glasfaser-Epoxy-Tapezierung
Images added to a gallery album owned by ArchIgl_X in Construction report
-
-

Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
ThomasI replied to ThomasI's topic in Comments to Building reports: Ships
Ahhh, jetzt verstehe ich. Ich habe durchaus die Anleitung gelesen und alles vorbereitet Aber ich kenne das bei mir sehr gut: Kaum habe ich etwas dann irgendwo eingefügt dann lese ich schon wieder Fehler, sie mir beim zig mal davor lesen nicht aufgefallen sind. Ich (und die Leser) werden wohl mit ein paar Tippfehlern leben müssen. 😅 -

Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
JL replied to ThomasI's topic in Comments to Building reports: Ships
Hallo Thomas, insgesamt ein sehr interessanter Ansatz. Ich hoffe, du lässt uns im Rahmen deines Berichts noch mehr Details zukommen - kann man ja nur von lernen. -
Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
JL replied to ThomasI's topic in Comments to Building reports: Ships
Ich sach nur: RTFM! -
Noch eine schnelle Ergänzung zu "wohin führen die ganzen Kabel?" Zum Beispiel hier hin: In Blick in das Kabelgedränge unterhalb des Steuerpultes. Eine Servozuleitung - Steuerrad, ein I2C Bus - OLED Display und 3 LED Signale. Die letzten beiden teilen sich zumindest die Masse-Zuleitung.

-

Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
MatthiasSchumi replied to ThomasI's topic in Comments to Building reports: Ships
Hallo Thomas, ich kann Volkart nur beipflichten. Für die Erstellung von Bauberichten haben wir eine kleine Hilfe gemacht: Die ist hier zu finden: Viele Grüße Matthias -
Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
ArchIgl_X replied to ThomasI's topic in Comments to Building reports: Ships
Hallo Thomasl, das Nachbearbeiten von Beiträgen ist nach einer Zeitspanne von ca. 10 Minuten nicht mehr möglich, wie ich auch erfahren musste, man muss also vollkonzentriert seinen Beitrag abackern, sonst kann evtl. nur noch ein dazu autorisierter Moderator helfen - was vom erforderlichen Zeitaufwand her nur selten zumutbar erscheint. Die Text schreibe ich deshalb vorher extern und füge sie dann mit "copy + paste" Gruss Volkart Von Moderator Steinbeisser bearbeitet Bitte nicht in den Baubericht schreiben, ich habe es hier in den Kommentarbereich verschoben. Vielleicht auch am Ende der Berichte mal den Kommentarbereich verlinken, das macht es übersichtlicher und einfacher. -
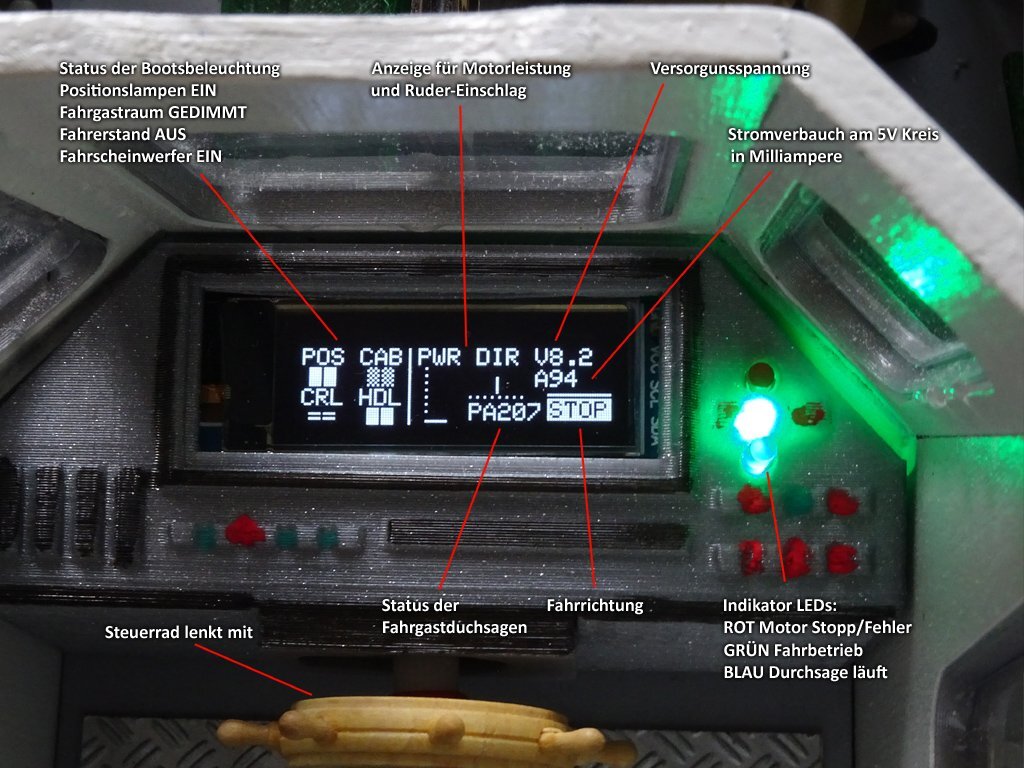
Ein neuer Tag und ein neues Kapitel in meinem Baubericht. Jetzt wird es elektronisch... Vorschau: Ich erstelle gerade ein Video, das alle beschriebenen Funktionen auch mal zeigen wird – unter „Laborbedingungen“ … aber ja, es geht auch am Wasser. Dieses Video folgt dann im Abschluss nach dem letzten Kapitel des Bauberichts. Unzählige Funktionen gesteuert über nur 4 Kanäle – oder: was mach ein Arduino in einem Bootsmodell. Aus der Erfahrung mit dem Bau meiner Modellautos habe ich einen Arduino Nano als „Zentralcomputer“ übernommen. Die Elektronik folgt einer strikten Logik: Nur die essentiellen Funktionen werden klassisch über die RC Steuerung kontrolliert – im Fall des Bootes sind dies der Antrieb und das Ruder. Über alles andere herrscht der Arduino Nano und ein eigens entwickeltes Programm. Was ist ein Arduino? Für diejenigen für die dieses Gebiet Neuland ist, eine kurze Erklärung: Ein Arduino verbindet einen Mikrocontroller Chip mit einer einfach zu verwendenden Elektronik Platine. Ein Mikrocontroller ist ein Computerchip – genauer gesagt ein winziger in sich geschlossener Computer der ein einziges Programm abfahren kann und über verschiedene Ein- und Ausgangsoptionen verfügt. Wer jemals z.B. eine Mikrowelle verwendet hat, der hat einen Mikrocontroller bedient. Ein Arduino nimmt so einen Mikrocontroller, setzt ihn auf eine kleine Platine führt die Ein- und Ausgangsoptionen auf einfach verwendbare Elektronik-Pins heraus und verpasst ihm einen USB Anschluss damit man sein Programm einfach wechseln kann. Dazu gibt es eine praktische Programmier-Umgebung und schon hat man seinen ganz individuellen Onboard Mini-Computer. Den Arduino und seine Verwanden gibt es von einfach bis zu extrem Leistungsstark. Ich habe mich für eine einfache Variante entschieden: Ein Arduino Nano, ein 8-Bit Computer, 16Mhz Taktfrequenz und 32kB Programmspeicher. (Diese Kombination von Arduino, Spannungsregler und einigen Zusatzkomponenten habe ich für meine Autos entworfen. Kommt jetzt auch im Vaporetto in den Einsatz) Der Vorteil gegenüber einer klassischen RC Lösung z.B. mit einem Baier Soundmodul: Der Arduino Nano verfügt über einen I2C Bus. Und über diesen können OLED Displays angesteuert werden. Somit wird der Status des Bootes im Fahrerstand auf in Echtzeit angezeigt – inklusive der zahlreichen Funktionen: 4 Lichtkreise – Positionslampen, Fahrgastraum, Fahrerstandbeleuchtung und Frontscheinwerfer. Ballast-Trimmung gegen Schlagseite. Das Steuerrad bewegt sich. Ein einfaches Diesel Sound Modul wird angesteuert. Es gibt Lautsprecheransagen zur nächsten Station – mit veränderbarer Lautstärke. Passend dazu auch verschiedene andere Ansagen wie z.B. Ticketkontrolle, Unterspannung oder Verlust des RC Signals. Verschiedene Messwerte werden direkt angezeigt (Spannung, Stromverbrauch) Und Status LEDs im Fahrerstand komplettieren den Showfaktor. Selbstverständlich kann niemand den Bildschirm wirklich sehen, wenn das Boot bei Sonnenlicht im Wasser fährt – aber ich weiß, dass es da ist. Das genügt. Der Elektronik-Aufbau – oder: wohin führen die ganzen Kabel. Die Arduino Seite verfügt über einen eigenen 5 Volt Spannungskreis, der die gesamte nicht-RC Elektronik versorgt. Sie ist ausgelegt auf 1.5A Dauerlast – das sollte genügen. Oled Display. Es ist direkt mit dem I2C Bus des Arduinos verbunden. 128X32 Pixel monochom. PCA9685 PWM Board. Auf PWM Signalen basiert die klassische RC Steuerung. Diese praktische Elektronik Komponente verfügt über 16 unabhängige PWM Kanäle und wird wie das OLED Display über den I2C Bus angesteuert. In der Folge steuert der PCA9685 die Bootstrimmung und das Steuerrad. Das PWM Signal kann aber auch verwendet werden um LEDs zu schalten bzw. zu dimmen. Und so hängen auch die Lichtkreise und die Status LEDs im Fahrerstand an diesem Bauteil. (Ergänzung: im Prinzip kann auch der Arduino selbst die PWM Signale erzeugen. Aber das benötigt viel Prozessorleistung und je Funktion einen Ausgangs PIN. Das PCA9685 entbindet den Arduino von dieser Aufgabe und schafft Raum für andere Rechenaufgaben) 4 Kanal Mosfed Power-Board Die Lichtkreise benötigen zu viel Leistung um direkt über das PCA9685 Board betrieben zu werden. Deshalb sind die nicht direkt angeschlossen, sondern werden über ein Mosfed Transistor Board geschaltet. Dies kann angeblich mit bis zu 10A umgehen. Die abgerufene Leistung am Vaporetto macht nur einen Bruchteil davon aus. HALL Sensor Dieser misst den aktuellen Stromverbrauch am 5V Kreis und gibt ihn an den Arduino weiter. DFPlayer Mini Diese winzige MP3 Player Komponente verfügt über einen 3W Verstärker und kann folglich einen kleinen Lautsprecher ohne weiteren Verstärker betreiben. Von Arduino Seite aus wird er über eine serielle Schnittstelle angesprochen. Die Verwendung ist denkbar einfach: MP3 Files sind auf einer Micro-SD Karte gespeichert – durchnummeriert. Der Player sitzt auf einer größeren Platine auf der ich ihm ich noch ein paar Bauteile spendiert habe um die Eingangsspannung zu glätten - für eine bessere Tonqualität. Der Arduino ruft eine Nummer auf und der MP3 spiele spielt ab. Eine Rückleitung signalisiert dem Arduino den aktuellen Abspiel-Status. Diesel Soundmodul ein einfaches No-Name Modul, das mit einem recht guten Lautsprecher geliefert wurde. Zusatzinfo zu dem Diesel Soundmodul: Ich habe hier ein ganz einfaches No-Name Soundmodul gekauft: eine kleine Platine, die sich unter einem Schrumpfschlauch versteckt. Gibt es bei AMAZON. Es erfüllt seinen Zweck. Aber sobald Spannung am Soundmodul angelegt wurde, ging auch der Diesel schon los. Ich habe den Schrumpfschlauch aufgeschnitten und siehe da, es gibt auf der Platine ein offenes Lötpad – nicht dokumentiert. In der Gefahr das ganze Modul zu vernichten, habe ich an dieses Pad ein Kabel angelötet und es mit einem Empfängersignal verbunden. Und siehe da: je nach Steuersignal schaltet es den Sound ein oder aus. Bis jetzt ist nichts abgebrannt! Ich habe auch eine Vermutung warum dieses Pad nicht dokumentiert ist: Sobald der Sound aus ist, höre ich einen massiven „Störteppich“ am Lautsprecher. Dieser wird nur vom Diesel Sound überdeckt. Wäre dies eine offizielle Funktion, würden vermutlich viele das Modul als „defekt“ abstempeln. https://www.schiffsmodell.net/index.php?/forums/topic/21254-kommentare-zu-baubericht-„vaporetto-actv-42“-128/



-
Noch eine Ergänzung zu meinem vorherigen Kapitel: Ich hatte ganz vergessen, dass es ja ein Video der ersten Ausfahrt gibt. Also Rumpf 1 – noch ohne Anbau-Kiel – ohne Lagetrimmung (und es fehlen noch einige Details am Modell). Ich lade das mal schnell auf Youtube hoch – ich denke man kann gut erkennen wie wackelig die ganze Sache unterwegs ist. Und dabei ist zu bedenken, dass auch Rumpf 1 bereits rund 20% gegenüber dem originalen Holzrumpf vergrößert ist. https://youtu.be/2NRx09qSAOs P.S.: ich scheine nicht in der Lage zu sein, alte Kapitel zu ergänzen oder Tippfehler zu beheben. Oder übersehe ich da was? (Gerne hilfreiche Kommentare dazu)
- Last week
-
Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
ThomasI replied to ThomasI's topic in Comments to Building reports: Ships
Nein, das funktioniert anders. Die Wanddicke z.B. der Aussenschale ist ein Teil der "Geometry Nodes" - ebenso alle anderen Dicken von Rumpfelementen. In das STL wird einfach das Ergebnis all dieser Berechnungen gespeichert. Wenn wir die Aussenschale als vereinfachtes(!!!) Beispiel hernehmen, dann wäre der Mathematische weg etwa so: -> Punktwolke "Aussenschale" glätten (Subdivision) -> Ergebnis um 2mm Extrudieren -> Ergebnis auf die andere Seite Spiegeln = Aussenschale fertig mit 2mm Wandstärke. Das kann dann als STL gespeichert und der 3D-Druck Software übergeben werden. Und die Punkte der Punktwolke sind eben in verschiedenen Gruppen zugeteilt: Außenschale Spanten Deck Kiel ... Und jedes durchläuft seine logischen Wege. Ich hoffe das ist so einigermaßen verständlich. -
Bausatz Graupner Gracia von 1964, aber Neuerstellung heute
Images added to a gallery album owned by ArchIgl_X in Construction report
-
-
Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
ThomasI replied to ThomasI's topic in Comments to Building reports: Ships
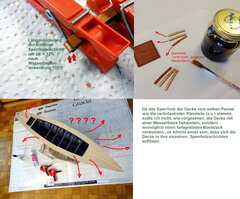
Hallo Ralf. Also ich gehe nicht davon aus, dass die Schussstelle zwischen Deck Rahmen und Rumpf (siehe V2.0) zu 100% dicht ist. Aber dieser Teil wird ja nicht unter Wasser gedrückt. Bei einer kleinen welle kann sich hier Tröpfchen-weise vielleicht etwas durchdringen. Aber für höheren Wellengang ist dieses Boot ohnehin ungeeignet - auch im Original. Was mir aber wichtig war, ist dass ich kein Wasser im Spalt zwischen Kunststoff und Holzdeck einschließe - denn das könnte nur schwer trocknen und würde sicher zu Auf-Quellungen führen. Deshalb ist beim V2 Rump an der Außenseite des Deckrahmens eine Silikonfuge gezogen worden. Diese ist unsichtbar von Aussen - sollte aber verhindern, dass Wasser nicht zwischen Deck und Rahmen kommt. -
Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
JojoElbe replied to ThomasI's topic in Comments to Building reports: Ships
Moin Thomas, Wegen Blender melde ich mich nochmal. ... Wenn du da stl herstellst, kannst du die Wanddicke angeben, oder wie läuft das? Vg Jörg -
Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
ThomasI replied to ThomasI's topic in Comments to Building reports: Ships
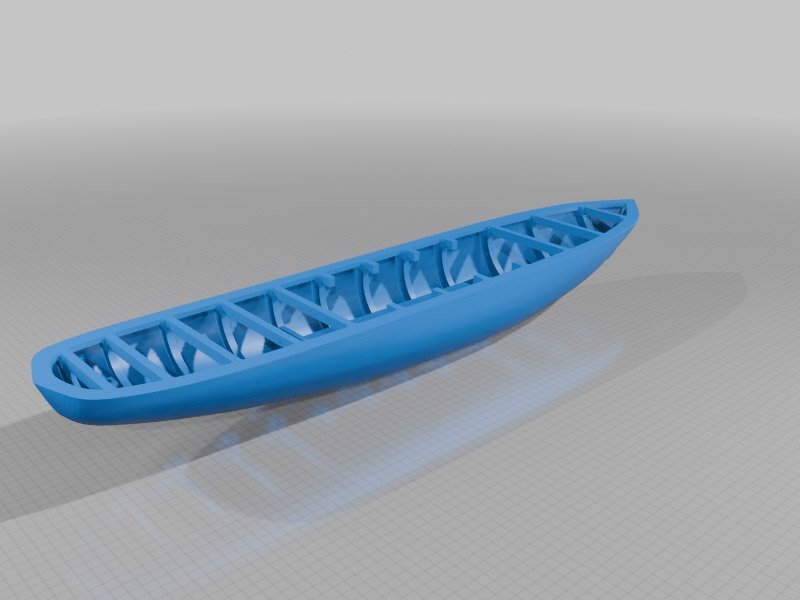
Hallo! Ich freue mich über das rege Interesse! Gerne gehe ich auf Detailfragen ein, sobald sie aufkommen. Vieles wird aber in den folgenden Teilen meines Bauberichts Ohnehin mit abgedeckt sein. Die der letzte Eintrag beschäftigt sich z.B. mit dem 3D Rumpf bzw. dessen 3D Modell. Dazu eine Ergänzung für Interessierte: Ich habe den Rumpf auf Thingyverse gestellt. Sowohl V1 als auch V3 (heißt auf Thingyverse "V3") https://www.thingiverse.com/thing:6994543 Viel Spass beim weiter Lesen! -
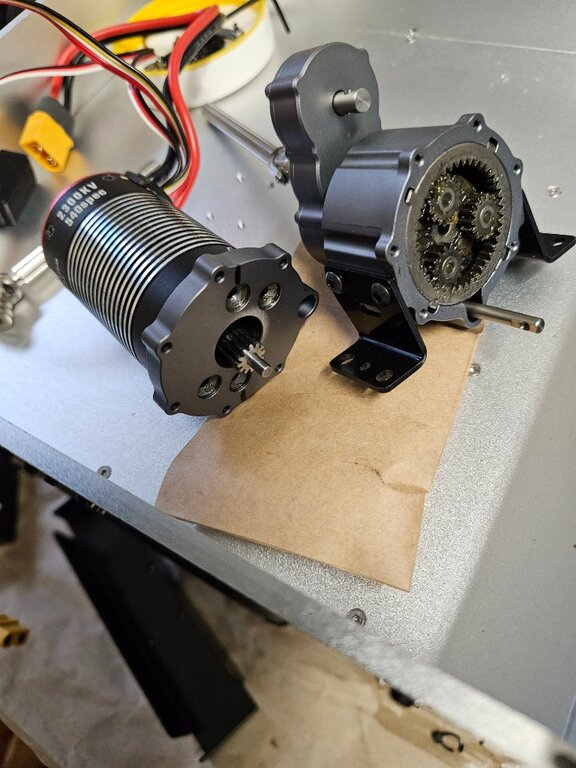
Der Rumpf als 3D Konstruktion Nun komme ich zum wohl auffälligsten Unterschied zum Originalbausatz: der neu konstruierte Rumpf. (Rumpf Version 1) Für die Konstruktion des Rumpfes habe ich auf ein 3D Programm gesetzt, dessen Stärken eigentlich in der Computeranimation liegen: Blender Aber es hatte für meine Zwecke eine entscheidende Funktion: „Geometry-Nodes“ Diese ermöglichen eine Gruppe von Konstruktionspunkten in einen „Logischen Baum“ zu übergeben. Dort wird nach Bedarf addiert, subtrahiert, interpoliert und noch vieles mehr. Am ende dieses logischen Baumes entsteht dann die komplexe Form des Rumpfes mit Hülle, Spanten, Kiel und einem Deck-Montage-Rahmen. Tatsächlich habe ich nur die Spanten des Bausatzes mit je 10 Punkten nachgebildet. Der Rest der komplexen Form entsteht dann dank der Magie der Gerometry-Nodes. Und Anpassungen in der Form sind ein Kinderspiel. Denn da im logischen Baum alles auf sich Bezug nimmt, passt sich alles automatisch jeder Änderung an. Einige Teile wurden dann doch noch von Hand in den Rumpf konstruiert – z.B. die Führung für Antriebswelle und Steuerruder usw... Der Drucker bekam dann seine Aufgabe in 4 Sektionen übertragen und ging mit jeder Menge PLA Kunststoff ans Werk. Jede Sektion hatte eine Druckzeit von 25-30 Stunden. Also gesamt wohl etwas über 100 Stunden Druckzeit. (vier Sektionen) Danach wurde verschraubt, verklebt und mit Epoxidharz überzogen. Wirklich perfekt ist das nicht geworden. Ich hätte vermutlich noch ein paar Stunden mehr schleifen müssen. Ich vertröste mich damit, dass die Original-Boote ja auch einige Dellen haben. Jedenfalls kamen die ersten Fahrten und Erweiterungen … und dann ... Rumpf Version 1 vs. 2.0 Nachdem ich mein Boot zum ersten mal ins Wasser gelassen hatte, war klar: Verbesserungen sind notwendig! Zum einen war das Fahrverhalten völlig unbefriedigend. Ich hatte in meiner Unerfahrenheit, die Welle viel zu steil angesetzt. Und das Ruder war dem Bausatz-Mass entnommen. Die Folge war, dass die Schraube das Ruder gar nicht abströmte. Die Steuerung war entsprechend ungenau. Zudem war Motor und Schraube die Panart im optionalen Modellierungsansatz liefert Rennboot-Tauglich: ein schwerer 540er Motor der zudem noch ab der steil gesetzten Welle höher liegt als im Originalmodell. Alles in allem ein viel zu hoher Schwerpunkt und viel Gewackel im Wasser. Ich bin dann dem großartigen Tipp der Vorarlberger Bootsbauer gefolgt und habe dem Boot einen abnehmbaren Kiel verpasst: Ballast raus aus dem Rumpf und unter das Boot. Nicht originalgetreu aber dafür funktional. Dazu ein größeres Ruder, eine kleinere Schraube und es wäre fast perfekt gewesen… ja wenn… Ja wenn da nicht mein Drang wäre immer neue Verrücktheiten in den Rumpf zu verbauen. Und dieser Drang wird sabotiert von den viel zu kleinen Öffnungen im Rumpf. Hatte ich anfangs vor, das Deck mit über 30 Schrauben mit Rumpf zu verbinden und mit Silikon ab zu dichten, änderte sich dieser plan nun: Denn ich hatte immer neue Ideen und jedes mal 30 Schrauben aus einem PLA Rumpf zu drehen um an die Innereien zu kommen, war klar zum Scheitern verurteilt. PLA hält so was nicht aus. (Rumpf Version 1 - alles in einem Block) Ich habe also ein Konzept für einen Rumpf 2.0 entwickelt: Das Deck wird NICHT direkt mit dem Rumpf verschraubt. Stattdessen bekommt das Deck einen eigenen Halterahmen mit dem es verschraubt und dann abgedichtet wird. Dieser Rahmen sitzt passgenau im Rumpf. Mein Freund „Geometry Nodes“ hat mir geholfen, auch das mittels logischer Verknüpfungen aus der Punkt-Konstruktion zu generieren. (Rumpf und Deckrahmen für V2.0) Und sechs Schrauben reichen durch das Deck und Rahmen bis zu fest im Rumpf verankerten Konter-Gewinden. Damit wird dann Rumpf und Deckkonstruktion fest verbunden. Und mit nur sechs Schrauben kommt man wieder in den Rumpf. Der Rahmen wurde mit Silikon gegenüber dem Deck abgedichtet, so dass kein Wasser zwischen Holz und Kunststoff eindringt. Angenehmer Nebeneffekt: nach dem Abnehmen der Deckkonstruktion ist der Rumpf ist auch offener, da die vielen Querverstrebungen nicht mehr benötigt werden. Natürlich wurde im Rumpf 2.0 auch die Lage der Antriebswelle korrigiert. Auch ein kleinerer Motor ist nun verbaut – immer noch mehr als genug Leistung. Und zudem habe ich den Rumpf etwas bauchiger gemacht. Das Ergebnis ist ein ganz anderes Fahrerlebnis: Stabil, gut steuerbar und schön zu beobachten. Ein Wort zu Motorisierung Falls jemand darüber nachdenkt sich diesen Bausatz zu kaufen… Panart/Mantua Model gibt an, dass man für die Motorisierung die entsprechende Option dazu bestellen muss. Das ist so nicht ganz richtig. Der Motorbausatz kommt mit einem 540er Motor (der meines Erachtens viel zu groß und leistungsstark für dieses Modell ist) und einer passenden Holzhalterung. Allerdings ist in den Holzplatten des Grund-Bausatzes bereits eine Motorhalterung enthalten – passend für einen 380er Motor (Mabuchi Größen) Warum diese nicht genutzt werden soll, ist mir schleierhaft. Ich habe mir jedenfalls einen 380er Motor besorgt und die entsprechende Halterung zusammengebaut. Das passt viel besser und spart Gewicht! (Rumpf 2.0 mit 380er Motor) https://www.schiffsmodell.net/index.php?/forums/topic/21254-kommentare-zu-baubericht-„vaporetto-actv-42“-128/







-
Na und dann war die Taufe aufm UT2025 angesagt, Taufpatin dankenswerterweise wieder Sabine @Spreeathenerin Und: Alle Bilder hier von Jörg @JojoElbe auch dafür DANKE! Schönes Bild der Taufe Für die Freunde bewegter Bilder Und ein paar Fahrimpressionen Das Teil ist aber zu leicht (hatte Mirko @Spreeathener bei der Qualitätskontrolle gleich bemerkt ), man sieht, daß der Jet Luft saugt. Da müssen jetzt noch min 1kg rein (am Heck und Richtung Bug) Grüssle Chris
-
 Berend joined the community
Berend joined the community -

Kommentare zu Baubericht „Vaporetto Actv 42“ 1:28
frank-s replied to ThomasI's topic in Comments to Building reports: Ships
Hallo Thomas, spannender Baubericht um ein schönes Modell. Mich würde interessieren, wie Du das 3-D Modell für den 3-D Druck erstellt hast. Gruß Frank