Search the Community
Showing results for tags 'fernsteuerung'.
-

MC 32 - Umschaltung zwischen Schiff und Tochterboot via Phasen
Ümminger Kapitän posted a topic in Graupner
Aus dem Thread mit den drei Antrieben und dem zuschaltbaren Boosterantrieb und der dann deaktivierten Ruderunterstützung entstanden, hier nun die Programmierung von zwei Empfängern, einer im Mutterschiff und einer im Tochterboot. Ich stelle das exemplarisch an einem umgeschalteten Kanal dar. Weitere werden syncron zum Beispiel programmiert. Voraussetzung sind zwei gebundene Empfänger auf einen Speicherplatz. Weiter müssen im Menu "Allgemeine Einstellungen" die Phasennamen vergeben werden. In meinem Beispiel ist das Normal, für das Mutterschiff und Beiboot eben für selbiges. Im Menu "Phasenzuweisung" werden die soeben benannten Phasen einem Schalter zugewiesen. Im Menu "Gebereinstellungen" werden jetzt auch die benannten Phasen angezeigt, je nach dem in welcher Position sich der zugewiesene Schalte befindet. Da der "offizielle" Kanal 1 nicht Phasenabhängig programmiert werden kann, ist dieser bereits in der Phase <Normal> auf Kanal 6 (E6)gemapt. In der Phase <Beiboot> ist der Geber 1 dem E5 zugewiesen. In der "Servoanzeige" kann die Funktion nun auch bereits überprüft werden. In der Phase <Beiboot> sollte sich jetzt Balken 5 Bewegen, in der Phase <Normal> bewegt sich Balken 6. Balken 1 bewegt sich ebenfalls mit, weil - wie oben schon bemerkt - die Einstellung global und nicht phasenabhängig ist. So weit so gut. Jetzt müssen die Empfänger wissen, auf welchen Kanal sie reagieren sollen. Dazu geht es in die "Grundeinstellungen Modell". Dort wird der Cursor auf den Empfänger (BD1)des Mutterschiffs gebracht, also auf die Kennung (z.B. E08) und mit Enter bestätigt. Nun können wir dem Empfängerausgang 1 Mitteilen, dass er auf Senderausgang 6 (E6) reagieren soll. Auf die gleiche Weise wechseln wir jetzt zum Empfänger des Beibootes unter BD2, da steht dann vielleicht E06, und teilen diesem mit, dass sein Ausgang 1 auf Senderausgang 5 reagieren soll. So gehts nun weiter, bis alle Kanäle zugewiesen sind, die umgeschaltet werden sollen. 2Empf-Phasenabh.PDF -
Hier nun die Genuasteuerung mit zwei Winden. Funktionsweise ist, dass wenn die Genua auf der Backbordseite steht, wird sie mit einer Winde gesteuert, die andere ist dabei voll gefiert. Der Dreiwegeschalter lässt beim umschalten in die Mittelstellung nun die Winde mit der Gesteuert wurde voll auffieren, die Genua ist in diesem Moment ungesteuert. Der Schalter in die andere Endposition umgelegt bewirkt, dass nun die zuvor voll gefierte Winde für die Segelmanöver in Betrieb ist, die andere Winde steht in voll aufgefierter Position. Auch hierbei, bitte die Servowege zum Einstellen zunächst stark begrenzen um Beschädigungen an den Schoten zu vermeiden. Auch hier sind die Einstellungen nur in den Menus Gebereinstellungen und Linearmischer vorzunehmen. Die Funktion wird auch bei anderen Sendern einstellbar sein, die über diese beiden Menus verfügen. Genua Steuerung mit zwei Segelwinden.PDF
-
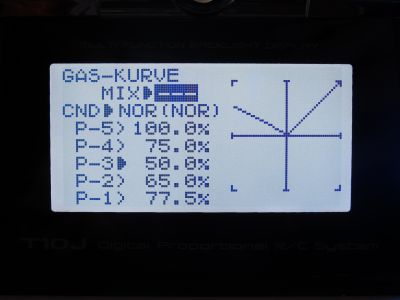
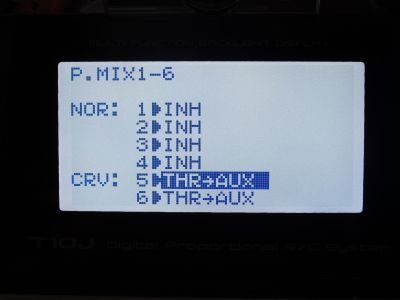
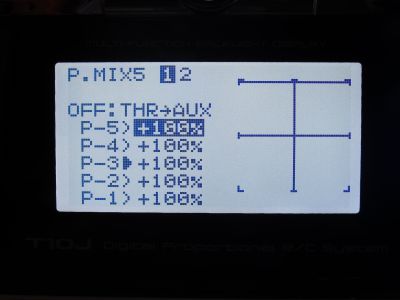
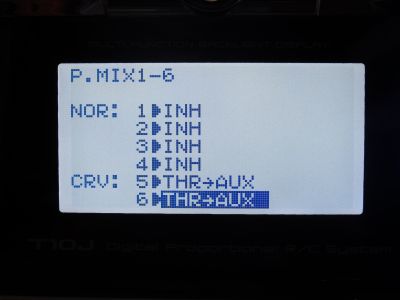
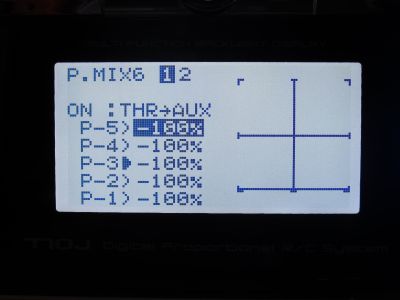
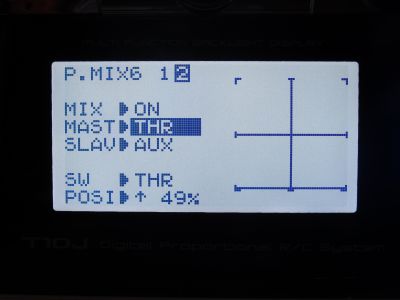
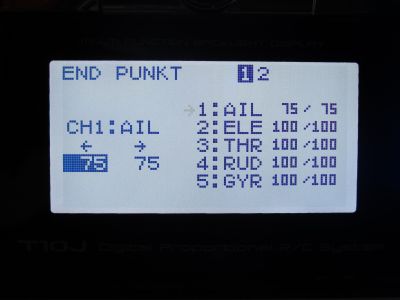
Hallo Zusammen, hier eine kleine Programmieranleitung wie ich meine Futaba T10J programmiert habe, damit die Umkehrklappe (Servo auf Kanal 8) nach unten fährt, sobald ich den linken Fernsteuerungsknüppel (Kanal 3) aus der federzentrierten Mittenposition (50%) nach hinten ziehe. Der Fahrtregler (Kanal 3) bekommt immer noch ein Vorwärtsfahrsignal, allerdings mit Reduktion der Maximalgeschwindigkeit. (Rückwärts ist ja eh nicht so effektiv beim Jet und damit nicht noch die Umkehrklappe "weggeblasen" wird, wenn man eine Notbremsung macht). Die Lenkung, also das Schwenken der Düse liegt auf dem linken Knüppel (Kanal 1) Die Anleitung mag in abgeänderter Form sicher auch für andere progammierbare Fernsteuerungen gelten. Bei meinem Vorgängermodell, einer analogen F14 hab ich noch mit einem Mikroschälterchen und zwei Potis in der Fernsteuerung gearbeitet, zudem musste ich beim Fahrtregler noch zum Lötkolben greifen um zu verhindern, dass der die Drehrichtung ändert, ja das waren noch Zeiten! Also die T10J ist ja eigentlich für Flugmodelle ausgelegt (Heli, Acro, Quadrokopter). Wir lassen sie im Helikopter-Modus. Anpassung der Gaskurve: Was machen: über die Punkte P-1 bis P-5 kann eingestellt werden welches Singal an Kanal 3 für den Fahrtregler anliegt. Gemäss den obigen Einstellungen ist die Geschwindigkeit bei Vorwärtsfahrt Linear und beträgt 100% wenn der Knüppel nach vorne "auf dem Tisch" liegt. Bei "Rückwärtsfahrt" haben wir ebenfalls eine einigermassen Lineare Geschwindigkeitskurve, erreichen aber nur 77.5% der Maximaldrehzahl des Motors. Da alle Punkte positiv sind, dreht der Motor auch bei "Rückwärtsfahrt" in der selben Richtung wie bei "Vorwärtsfahrt". (Falls die Drehrichtung für den Fahrtregler nicht passt, kann im Menüpunkt "Umpolung" das Signal invertiert werden) Nun zur Ansteuerung des Servos für die Umkehrklappe (bei mir auf Kanal 8). Ich "missbrauche" dazu die zwei frei programmierbaren Mischer 5 & 6 und will den Servo entweder zu 100% in die eine Richtung oder zu 100% in die andere Richtung ausschlagen lassen. Die Wegbegrenzung erfolgt später im Menüpunkt "Endpunkt". Auswahl Mixer 5: Was machen: Mixer 5 anwählen Einstellungen Mixer 5, Ebene1: Was machen: Wir stellen bei allen Kurvenpunkten P-1 bis P-5: +100% ein Einstellungen Mixer 5, Ebene 2: Was machen: Wir wählen aus, dass der Mixer als "Master" Kanal 3 (THR: Throttle beim Helikopter, also der Gashebel) nimmt und diesen auf "SLAVE" Kanal 8 "AUX" wirken lässt. "AUX", etwas unschön, bei der T10J heissen alle Kanäle 7 - 10 "AUX" und man muss durch durchzählen Kanal 8 auswählen: Kanäle: 1 - 2 - 3 - 4 - 5 - 6 - 7- 8 - 9 - 10 Kurzbezeichnungen: AIL - ELE - THR - RUD - GYR - PIT - AUX - AUX - AUX - AUX Vielleicht lassen sich die Bezeichnungen in einem anderen Menü abändern, muss ich mal noch untersuchen. Hinter MIX steht noch OFF, das ändert sich auf ON, sobald wir unter SW "Switch" (also die Schaltbedingung) THR "Throttle" (Kanal 3, linker Knüppel) diesen einen Hauch (von 50% auf 49%) nach hintern gezogen haben. Der kleine Pfleil nach unten hinter "POSI" lässt sich mit den "+" und "-" Tasten rechts vom Display umkehren und durch drücken des Joy-Stick-Knopfes wenn wir den Knüppel ganz leicht nach unten aus der Neutralposition gezogen haben (49%) sagen wir dem Mixer, dass er ab dann aktiv sein soll. Das schöne dabei ist, die Anzeige ändert sich live wie man am Knüppel fummelt Ausserdem empfiehlt es sich, zumindest den Umkehrsevo schon mal auf Kanal 8 anzustecken, allerdings noch ohne ihn Mechanisch mit der Klappe zu verbinden, damit er nichts abdrückt wenn er dann voll und eventuell zuerst auch noch in die falsche Richtung ausschlägt Nun kommt das selbe noch für Mixer 6. Mixer 6 auswählen: Mixer 6, Ebene 1: Was machen: Alle Punkte auf -100% einstellen Mixer 6 Ebene 2: Was machen: Wiederum Master ist Kanal 3 "THR" (Throttle, Gasknüppel), Slave "SLAV" ist wieder "AUX" (Kanal 8), als Schaltbedingung "SW" (Switch) wird wiederum der Gasknüppel beigezogen, diesmal allerdings sobald er bei 49% oder grösser (kleiner Pfeil zeigt nach oben) steht. Hier steht jetzt auch hinter "MIX" -> "ON" weil sich der Knüppel bei der Aufnahme in der Mittenposition auf 50% befand. Falls der Servo in die Falsche Richtung ausschlägt, kann man entweder die + / - 100% in den beiden Mischern vertauschen oder die Servo-Polariät im Entsprechnenden Menü Nun passen wir noch die Endpunkte des Umsteuerservos und des Lenkservos an, damit die uns nicht die Anlenkung verbiegen oder gar beschädigen und sich unnötig auf Druck einen abackern und zuviel Strom verbraten. Menü End Punkt Ebene 1: Was machen: Unter Kanal 1 "AIL" begrenzen wir den Lenkservo (bei mir je 75%) Menü End Punkt Ebene 2: Was machen: Unter Kanal 8: AUX begrenzen wir den Umkehrservo (bei mir auf 34% bzw. 49%) Tipp: Hier vor dem Einbau des Servos ganz kleine Werte (10%) eintragen und dann in eingebautem und voll angesteuerten Zustand mit den "+" "-" Tasten die Werte soweit wie nötig erhöhen". Ja, das wärs dann soweit mal in groben Zügen Ich hoffe es war einigermassen Verständlich und dem einen oder anderen als Ideenspender hilfreich. Mit diesen Einstellungen lässt sich der Jet-Antrieb fast wie ein konventioneller Schiffsantrieb fahren. Auch Notbremsungen funktionieren erstaunlich gut gamit. Ich verwende SBUS Servos und hab diese noch etwas getuned, damit sie auch schön schnell reagieren, aber das ist optional. Wer auf eine separat angesteuerte Umkehrklappe schwört, der ignoriert meinen Beitrag hier ganz einfach Grüsse Jetmaster


-
MC32 - VSP Steuerung mit Antriebsregelung
Ümminger Kapitän posted a topic in Sender, Empfänger, Module
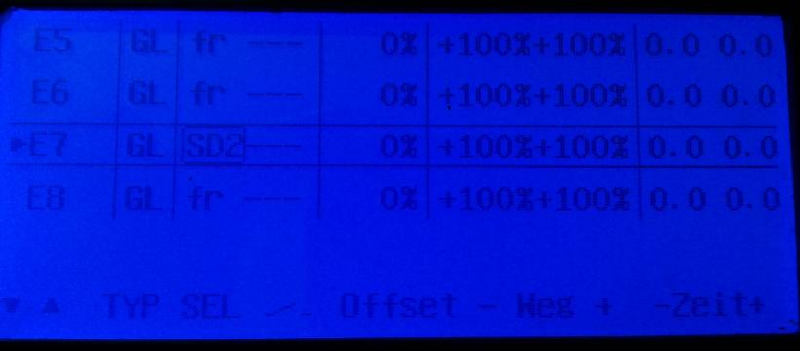
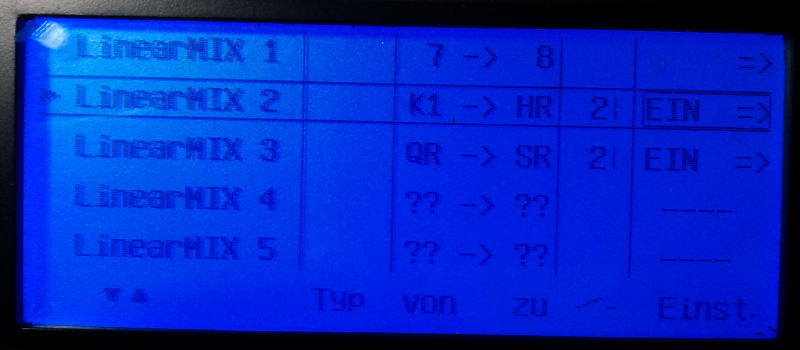
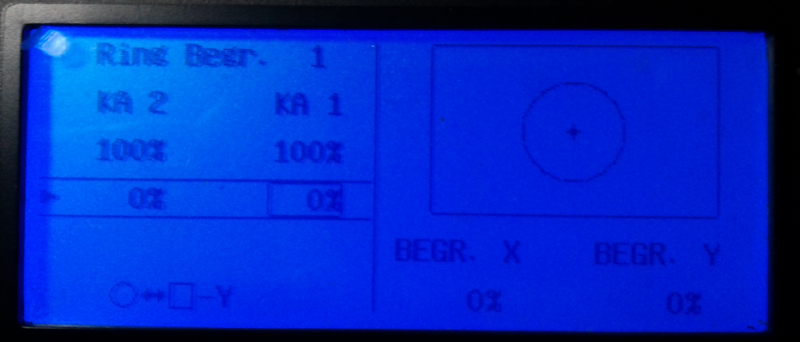
Dann werde ich diesen interessanten neuen Bereich mal eröffnen. In meinem ersten Beispiel möchte ich die Ansteuerung zweier Voith Schneider Antriebe(VSP) Die Antriebe wird können über Linear Mischer auf einen Knüppel gelegt um für die Marschfahrt parallel gesteuert werden. Zum Manövrieren lassen sich die Antriebe trennen und das Modell wird mit zwei Knüppeln manövriert. Die Antriebsdrehzahl für beide Maschinen wird über den seitlichen Hebel (SD2) geregelt. Einstellungen: Grundeinstellung Modell: Steueranordnung 4 Grundsätzlich ist das egal, für die erfolgreiche Nachprogrammierung aber erforderlich. Gebereinstellung: E7 | GL | SD2 --- | 0% | + 100% - 100% | 0.0 0.0 Freie Mischer: LinearMIX1 | | 7 -> 8 | | => | Mixanteil ASY +100% - 100%, Offset 0% LinearMIX2 | | K1 -> HR | 2l | EIN => | Mixanteil ASY +100% - 100%, Offset 0% LinearMIX3 | | QR -> SR | 2l | EIN => | Mixanteil ASY +100% - 100%, Offset 0% Ringegrenzer: 2 1 2 1 EIN | Ringbegr. 1 KA2 100% / 0% KA1 100% / 0% 4 3 4 3 EIN | Ringbegr. 2 KA2 100% / 0% KA1 100% / 0% Empfängerbelegung: Belegung GR24: Steckplatz 1 = Steuerservo Voraus li Steckplatz 2 = Steuerservo Seite li Steckplatz 3 = Steuerservo Voraus re Steckplatz 4 = Steuerservo Seite re Steckplatz 7 = Drehzahlsteller li Steckplatz 8 = Drehzahlsteller re Kommentare und Anregungen, gerne. Weitere Sender wo ihr das erfolgreich einsetzt, für ich gerne hinzu. Bitte daran denken, dies kann nur eine Grundeinstellung sein, die Feinjustierung insbesondere der Servowege und der Begrenzer sind von eurem Modell abhängig.


-

Der Neuaufbau einer Graupner FM6014 zur Jeti 2,4GHz - 6032
K_Mar posted a topic in Sender, Empfänger, Module
Hallo, meine schwarze 6014 hat einen Umbau hinter sich, der diese zur 16-Kanal Anlage ( daher 6032 ) mit eingebauter Telemetrie (Jetibox) gemacht hat. Die Jetibox ist der Bausatz von Ralf Horstmann ( www.turbinenheli.de ) mit einem schwarz/weißen DOGM162 von Reichelt. Mit den roten Tasten in der linken Seitenwand wird die Box bedient, der gelbe Taster in der linken Wand dient der Displaybeleuchtung (Weiß). Die Batterieanzeige mußte dieser Box weichen, als Ersatz dienen 7 LEDs ( Regenbogen blau (>8V) bis rot (< 6,4V)) unterhalb des Displays. Von hinten betrachtet ist über Boxleiterplatte das TU-Sendermodul auf Stützern aufgebaut. Das TU-Modul habe ich gebraucht und überholt erstanden, bei der Überholung hat die die Software des TU2 erhalten und ist damit in der Lage im V2-Modus mit halben Zeiten 16 Kanäle in 20ms zu übertragen. Da die 2,4GHz-Antennen ein eigenes Knickgelenk haben, ist das riesige Antennengelenk (Kugel) rausgeflogen und durch eine schwarz eloxierte 2mm Aluplatte ersetzt. Links neben den Sendemodul sitzt der Tiefentladeschutz und ein LM3103-Schaltregler, der die gesamte Elektronik incl. Box und TU mit 4,8V versorgt, bei einem Wirkungsgrad von 95%. Mit dem 2s NCR18650 - Akku hat der Sender damit eine Betriebszeit von 35h. An der klassischen Stelle des bisherigen Impulsteils sitzt auch der neue Eigenbau, die 6 freien Kanäle kommen noch an die Multiprop/switch-Einheiten für die 24 EIN-AUS-EIN Schalter an den oberen Schrägen und die unteren 12 Drehpotis. Der Verteilerzähler befindet sich schon auf dem Pulsteil, so daß an den Schalter und Potis nur noch 4053 als Multiplexer nötig sind. Gesamt hat die Anlage damit Direkte Kanäle: 9 Prop ( 2 Kreuzknüppel - 4 Schieber - 1 Drehpoti) 1 Schalter EIN-AUS-EIN die 6 weitern Kanäle sind mit Multiprop/switch aufgeteilt zu 12 Drehpots 24 Schalter EIN-AUS-EIN.. Gesamt 21 Prop- / 25 Schalt (EIN-AUS-EIN) - Kanäle Für das gebrauchte TU-Modul habe ich 80€ gelöhnt, die Leiterplatte für die Jetibox hat mit Porto 25€ gekostet, das Display mit Beleuchtung 22€ ( die mußte ich nicht bezahlen, war ein Geschenk meiner Kinder), Schalter & Halbleiter ca.50€. Die beiden Zellen NCR18650 schlagen mit 18€ zu Buche. Das Eloxieren der Bleche ( Antennenplatte und 4 Abdeckbleche-Schalter/Potis) hat anteilig 20€ gekostet Also zusammen ein Wert von ca.230€ + vorhandener schwarzer 6014 Die roten Tasten an der Seite sind zum Bedienen der Jetibox, d.h. Umschalten der möglichen Messsensoren am Empfänger und diverser anderer Jeti-Funktionen. Gruß Klau Gruß Klaus



-
Umbau MC22 - oder, zwei Knüppel sind zuwenig
Ümminger Kapitän posted a topic in Sender, Empfänger, Module
Moin zusammen, dieses Wochenende habe ich mich mal aufgerafft, die MC22 zu entkernen und einen Fräser ins Gehäuse zu halten. Für die Steuerung der Neuwerk werden 6 Kanäle benütigt. Jeder Antrieb wird separat gesteuert. Dazu verwende ich die Steuerung von Kagelmacher. Da diese Steuerung nur schwierig mit zwei Schiebereglern anzusteuern ist, musste als ein dritter Kreuzknüppel her. Ein weiterers originales Kreuzknüppelaggregat fand ich etwas zu sperrig, dadurch hätte es nicht zwischen die beiden vorhandenen gepasst. Dieser schnuckelige Kreuzknüppel von Sol Expert sollte es sein. Vorteil gegenüber denen, die bei Conrad und Reichelt erhältlich sind, stimmen bei diesem Teil die Werte der Potis. Außerdem hat das Teilchen noch einen Taster eingebaut. http://www.schiffsmodell.net/attachment.php?attachmentid=12692&d=1336326477 Da die Bedienung an den kleinen Pinni nicht gerade sehr feinfühlig ist, musste der noch verlängert werden. Quasi mit einem Griff. Nun wäre es zu einfach gewesen, einfach nur ein Loch in irgendein Material zu bohren, daraus irgendwie die Form eines Knüppelgriffe zu dengeln ... Nein, der Pin an dem Joystick ist rechteckig. In der Kramkiste habe ich noch etwas Delrin (POM) gefunden. Ein von den Dimensionen des Pins zufällig passendes MS Profil war auch noch da. Das MS Profil habe ich erwärmt und dann den POM Stab da drauf gedrückt. So habe ich das dann erkalten lassen, in der Hoffnung, dass sich eine halbwegs passende Öffnung bildet. Da nach dem Abkühlen das POM mehr oder weniger fest mit dem MS Stab verbunden war, musste der nochmal erwärmt werden, dann habe ich das Plaste abgezogen. http://www.schiffsmodell.net/attachment.php?attachmentid=12693&d=1336326477 Nun ja, für einen Kruzknüppel noch etwas unhandlich, aber passt. Das POM sitzt stramm auf dem Pin vom Joystick. http://www.schiffsmodell.net/attachment.php?attachmentid=12694&d=1336326477 In Ermangelung einer Drehmaschine habe ich das Rundmaterial ind die kleine Proxxon Fräse und in die Bochmaschine eingespannt und zurecht geschnitzt. http://www.schiffsmodell.net/attachment.php?attachmentid=12695&d=1336327642 Ist schon ein Sauzeug, dieses POM, ich hatte mir gewünscht, dass da eine halbwegs glatte Oberfläche bei rumkommt. Mal schauen, vielleicht versuch ich mich an noch so einem Ding. Aber erstmal, in den Sender einbauen.



-
So, nachdem ich jetzt Arbeitstechnisch etwas mehr Ruhe habe, möchte ich endlich mal das Urprojekt (Das Projekt mit dem die ganze RC Arduino Geschichte anfing) vorstellen. Mein Sohn und ich haben für ihn eine Feuerwehr Dolly gebaut. Mit Pumpe und Blaulich natürlich. Für die Ansteuerung brauchte ich natürlich einen Schalter. Also den 1-Kanalschalter von Conrad bestellt. Der war aber leider schnell kaputt. Also was neues, oder was eigenes. Da ich mich damals gerade mit den Arduinos beschäftigt habe, war es logisch, das Projekt damit zu machen. Aber was genau sollte denn der Schalter tun. Ich hab einen Protortionalkanal frei. Also am besten beide Richtungen dafür nutzen. Nach oben tippen geht das Blaulicht an bzw. aus, nach unten halten startet die Pumpe. Daraus entstand die erste Version des Programms. Mittlerweile hat sich das Programm etwas weiter entwickelt. Es kann nämlcih auch noch blinken, brauch ich aber für das Boot nicht, da ich blaue BlinkLED's eingebaut habe. Im Paket ist alles enthalten was ihr so braucht. Einfach in euren Sketchbook Ordner extrahieren. Darin sind 3 Ordner enthalten. - Feuerwehr, mit dem eigentlichen Programm - libraries, die abhängigen Bibliotheken - hardware Ein Schmankerl ist noch dabei. Hardware beinhaltet zus. Cores für ATTiny Serie. Das PRogramm läuft nämlich auch auf einem ATTiny85. Ich hab dazu auch eine Platine entwickelt. Die wird mit einem ATTiny verwendet. DAnn braucht man nicht den teuren Arduino im Modell versenken. (Soviel erst mal zu dem Thema: "Mit Arduino kann man nur Arduinos programmieren...") Feuerwehr.zip
-
Hallo, nachdem das Auslesen eines RC-Signals klappt, steht jetzt eine sinnvolle Anwendung an. Ich möchte die in meiner FX30 vorhandene Schaltkanal-Funktion auf der Empfängerseite auswerten. Es gibt zwar von robbe/Futaba den dazugehörigen Dekoder, aber da mir niemand sagen konnte, ob dieser auch mit dem 2,4 GHz-System von ACT funktioniert, mache ich das jetzt auf diese Art zu Fuß. Zunächst fange ich bei 40 MHz an; diese Systeme sind meines Wissens alle ähnlich aufgebaut: Nach einem oder zwei Synchonisationspulsen werden die Informationen für die in der Regel 8 Schalt- oder auch Proportionalfunktionen nacheinander übertragen. Ob das auch bei der FX30 so ist, soll das nachfolgende Programm zeigen. Bitte nicht wundern, dass es dann doch zwei Programme sind. Ich habe es einmal mit der schon erwähnten Funktion und ein anderes mal mit den Interrupts gelöst. Weil auf meinem kleinen (2*8 Zeichen) LC Display nicht genug Platz ist, gebe ich die Ergebnisse auf dem Terminal aus. Das hat dann auch noch den Vorteil, dass man diese Werte speichern und in anderen Programmen weiterverarbeiten kann. Hier die Lösung mit der Funktion: '----- Titel ------------------------------------------------------------------- ' Module.......: SchaltkanalStart.bas ' Purpose......: Reads pulses of a Rx channel controled by Tx switch function ' and displays measured values on Bascom's terminal emulation ' To store readings open terminal log file before reading ' Number of reads in constant LoopRead ' Author.......: Jürgen Laakmann ' Version......: 0.1 ' MCU..........: ATmega16 using Pollin evaluation board ' Started......: 17.12.2012 '------------------------------------------------------------------------------- '----- Change History ---------------------------------------------------------- ' dd.mm.yyyy: '------------------------------------------------------------------------------- '----- Function ---------------------------------------------------------------- ' Parameter..: PulseLength ' Return.....: Measured Tx signal pulse length '------------------------------------------------------------------------------- '----- Settings ---------------------------------------------------------------- $regfile = "m16DEF.Dat" $crystal = 1000000 $baud = 4800 $hwstack = 32 $swstack = 10 $framesize = 40 '----- Functions --------------------------------------------------------------- Declare Sub Getpulse(PulseLength As Word ) '----- Constants --------------------------------------------------------------- Const LoopRead = 20 'defines number of RC signal read cycles Const Timer0PreSet = 158 'gives interrupt after 65 ms with prescale=1024 '----- Variables --------------------------------------------------------------- Dim PulseLength As Word Dim PulseNumber(LoopRead) As Word 'stores readings of RC signal Dim PulseError As Byte 'stores errors, given by Timer0 Dim Count As Byte 'used as loop counter '----- Ansteuerung Pollin Evaluation Board ------------------------------------- Dim KeyPressed as Bit ddrd = &B11100000 'PinD5-7 output, PinD0-4 input ' portD = &B11111111 'PullUp PinD0-7 active Key1 Alias Pind.2 Key2 Alias Pind.3 Key3 Alias Pind.4 LED1 Alias Portd.5 LED2 Alias Portd.6 Buzzer Alias Portd.7 '------------------------------------------------------------------------------- '----- Initialization ---------------------------------------------------------- 'RS232-Communikation: I/O-Puffer Config Serialin = Buffered , Size = 20 Config Serialout = Buffered , Size = 20 'LCD configuration Config LCD = 16 * 1 Config Lcdpin = Pin , Db4 = Portb.4 , Db5 = Portb.5 , Db6 = Portb.6 , Db7 = Portb.7 , E = Portb.2 , Rs = Portb.0 Cls Config Pina.0 = Input 'used for RC signal Config Timer0 = Timer , Prescale = 1024 Config Timer1 = Timer , Prescale = 1 LED1 = 0 LED2 = 0 On Timer0 Mispulse For Count = 1 to LoopRead Step 1 PulseNumber(Count) = 0 Next Count PulseError = 0 '===== Program ================================================================= '----- Part 1 ------------------------------------------------------------------ ' Waits until Key1 is pressed Cls Upperline : Lcd "Ready?" Lowerline : Lcd "Press K1" Bitwait Key1 , Set Reset Key1 ' key bounces, re-sets key for next stop point Cls Upperline : Lcd "Running" '----- Part 2 ------------------------------------------------------------------ Enable Timer0 Enable Timer1 Enable Interrupts Timer0 = Timer0PreSet Do For Count = 1 to LoopRead Step 1 Call GetPulse(PulseLength) PulseNumber(Count) = PulseLength Next Count Cls Upperline : Lcd "Done" Lowerline : Lcd "Press K1" Bitwait Key1 , Set Reset Key1 Upperline : Lcd "See term" Lowerline : Lcd "inal " Waitms 500 Print "Gemessene Pulslängen" For Count = 1 to LoopRead Step 1 If Count < 10 Then Print " " ; Count ; ";"; Else Print Count ; ";" ; End If Print PulseNumber(Count) Next Count Upperline : Lcd "New run?" Lowerline : Lcd "Press K1" Bitwait Key1 , set Cls Reset Key1 Upperline : Lcd "Running" Loop '===== End of program ========================================================== End 'end program '----- Subroutines ------------------------------------------------------------- Sub GetPulse(PulseLength As Word) PulseLength = 0 Bitwait Pina.0 , Set Timer1 = 0 Start Timer1 Bitwait Pina.0 , Reset Stop Timer1 PulseLength = Timer1 Timer0 = Timer0PreSet End Sub '----- Interrupts -------------------------------------------------------------- Mispulse: Incr PulseError If PulseError > 10 Then Stop Timer0 LED1 = 1 Waitms 200 PulseError = 0 LED1 = 0 Start Timer0 End If Return Und jetzt die Variante mit den Interrupts '----- Titel ------------------------------------------------------------------- ' Module.......: SchaltkanalStart_Int0.bas ' Purpose......: Reads pulses of a Rx channel controled by Tx switch function ' and displays measured values on Bascom's terminal emulation ' To store readings open terminal log file before reading ' Number of cycles to read in constant LoopRead ' Author.......: Jürgen Laakmann ' Version......: 0.1 ' MCU..........: ATmega16 using Pollin evaluation board ' Bascom.......: V2.0.7.5 '------------------------------------------------------------------------------- '----- Change History ---------------------------------------------------------- ' 27.12.2012 V0.1: Created '------------------------------------------------------------------------------- '----- Function ---------------------------------------------------------------- ' Parameter..: PulseLength ' Return.....: Measured Tx signal pulse length '------------------------------------------------------------------------------- '----- Settings ---------------------------------------------------------------- $regfile = "m16DEF.Dat" $crystal = 1000000 $baud = 4800 $hwstack = 32 $swstack = 10 $framesize = 40 '----- Constants --------------------------------------------------------------- Const LoopRead = 20 'defines number of RC signal read cycles Const Timer0PreSet = 6 'gives interrupt after 255 ms with prescale = 1024 Const ErrorTolerance = 10 'number of errors before showing error condition '----- Variables --------------------------------------------------------------- Dim PulseLength As Word Dim PulseNumber(LoopRead) As Word 'stores readings of RC signal Dim PulseError As Byte 'stores errors, given by Timer0 Dim Count As Byte 'used as loop counter Dim ErrorFlag as Bit Dim RC_Read as Bit RC_In alias Pind.2 '----- Ansteuerung Pollin Evaluation Board ------------------------------------- Dim KeyPressed as Bit ddrd = &B11100000 'PinD5-7 output, PinD0-4 input ' portD = &B11111111 'PullUp PinD0-7 active ' Key1 Alias Pind.2 'used to read RC signal Key2 Alias Pind.3 Key3 Alias Pind.4 LED1 Alias Portd.5 LED2 Alias Portd.6 Buzzer Alias Portd.7 '----- Initialization ---------------------------------------------------------- 'RS232-Communikation: I/O-Puffer Config Serialin = Buffered , Size = 20 Config Serialout = Buffered , Size = 20 'LCD configuration Config LCD = 16 * 1 Config Lcdpin = Pin , Db4 = Portb.4 , Db5 = Portb.5 , Db6 = Portb.6 , Db7 = Portb.7 , E = Portb.2 , Rs = Portb.0 Cls Config int0 = Change 'used for RC signal Config Timer0 = Timer , Prescale = 1024 Stop Timer0 Config Timer1 = Timer , Prescale = 1 Stop timer1 Timer0 = Timer0PreSet On Timer0 Mispulse On INt0 GetPulse For Count = 1 to LoopRead Step 1 PulseNumber(Count) = 0 Next Count PulseError = 0 Reset ErrorFlag Set RC_Read LED1 = 0 : LED2 = 0 'LED's on board off Timer0 = Timer0PreSet timer1 = 0 '===== Program ================================================================= ' Waits until Key2 is pressed Cls Upperline : Lcd "Ready?" Lowerline : Lcd "Press K2" Bitwait Key2 , Set Reset Key2 ' key bounces, re-sets key for next stop point Cls Upperline : Lcd "Running" Enable Timer0 : Enable Timer1 Start timer0 Enable Interrupts Do Count = 1 Enable Int0 While Count <= LoopRead ' PulseNumber(Count) = PulseLength Wend Disable INT0 Cls Upperline : Lcd "Done" Lowerline : Lcd "Press K2" Bitwait Key2 , Set Reset Key2 Upperline : Lcd "See term" Lowerline : Lcd "inal " Waitms 200 Print "Gemessene Pulslängen" For Count = 1 to LoopRead Step 1 If Count < 10 Then Print " " ; Count ; ";"; Else Print Count ; ";" ; End If Print PulseNumber(Count) Next Count Upperline : Lcd "New run?" Lowerline : Lcd "Press K2" Bitwait Key2 , set Cls Reset Key2 Upperline : Lcd "Running" Loop '===== End of program ========================================================== End 'end program '----- Interrupts -------------------------------------------------------------- GetPulse: If RC_Read = 1 then 'AND RC_In = 1 Then 'start Timer1 if positive signal on input Start Timer1 Reset RC_Read Else 'stop Timer1 if no positive signal Stop Timer1 PulseNumber(Count) = Timer1 Set RC_Read Incr Count Timer1 = 0 End If Timer0 = Timer0PreSet Return Mispulse: Set ErrorFlag Incr PulseError If PulseError > ErrorTolerance Then Stop Timer0 LED1 = 1 Waitms 200 LED1 = 0 PulseError = 0 Reset ErrorFlag Start Timer0 End If timer0 = Timer0PreSet Timer1 = 0 Return Die gemessenen Werte habe ich in eine Tabellenkalkulation übertragen http://jl.schiffsmodell.net/SchaltkanalMessung.ods In beiden Fällen gibt es einen Synchonisationsimpuls, dem dann die 8 Werte der einzelnen Kanäle folgen. Erstaunlich finde ich nur, dass die verwendete Messmethodik einen Einfluss hat; beim Lesen mittels Funktion ist der SyncImpuls der längste, beim Lesem mit den Interrupts ist es der kürzeste Messwert. Hat jemand eine Idee, warum das so ist?
-
Hallo, Da ich nun auf dem Graupner-HoTT-System umgestiegen bin habe ich mich entschlossen, für den Empfänger ein Wechselhalter zu bauen. Dazu habe ich erst mal den Empfängerschlitten gebaut. Diesen habe ich aus einer 4mm dicken Aluminiumplatte gefräst. Die Seitlichen Aussparungen dienen später zur Befestigung (so eine Art Bajonett-Verschluss) Das große Loch in der hinteren Mitte soll das ganze Teil etwas leichter machen. Und durch den vier kleinen Löchern werden später Kabelbinder gezogen, um den Empfänger fest zu schnallen. Die Platine mit der Stiftleiste ist die spätere Schnittstelle zum Modell, auf der Rückseite werden dann später die Leitungen angelötet, die zum Empfänger führen. So der Schlitten ist fertig, nun muss der eigentlich Halter gebaut werden, davon müssen dann alle Modell, die mit diesem Empfänger betrieben werden soll, einen bekommen. MfG Thandor
-

Kommentare zum Umbaubericht robbe F14 Navy und FC-16 Boat 'n Truck auf 2,4GHz EZC
Arno Hagen posted a topic in Comments to Building reports: Ships
Kommentare, Anmerkungen, Verbesserungsvorschläge sind immer willkommen! Hier geht es zum Umbaubericht -
Hallo Leute, ich möchte meine MC19 mit einem Graupner Nautic-Modul ausstatten. Das Problem: die Sync-Leitung (einzelnes Kabel am Modul) muss auf dem 14-pol. Erweiterungsstecker angeschlossen werden, ich weiß aber nicht, auf welchem Pin. Von Graupner gibt es wohl ein Adapterkabel, aber um nur eine einzige Leitung auf den Stecker zu führen, halte ich das für etwas übertrieben... passende Steckverbinder habe ich da. Wäre prima, wenn mal jemand schauen könnte, der diese Kombi schon im Einsatz hat. Bei der MC22 müsste das eigentlich genauso sein. Danke & Grüße Torsten

-
Hallo zusammen ich bin neu hier im Forum, bin zur Zeit an meinem ersten eigenen Modell, einem U-Boot dran. Nun bin ich bereits auf mein erstes Problem gestossen: ich habe eine robbe F14 fernsteuerung, allerdings kann ich den Akku mit meinem Ladegerät nicht über die Ladebuchse aufladen, da eine Diode das intelligente Ladegerät (mit automatischer Ausschaltung wenn Akku voll) blokiert. Nun würde ich gerne die Diode überbrücken, hat dies jemand schon gemacht? Erfahrungen? lg nimsay
-
Ahoi Modellbauer Gestern hat mich Modellbauer in einem Nachbar-Forum gefragt, ob es möglich wäre, eine andere Art der Steuerung des Ruders, anstelle des Kreuzknüppels, zu bauen. Wir alle kennen ja das. Schiff läuft, auch bei Geradeaus-Fahrt aus dem Ruder. Da der Knüppel ja automatisch neutralisiert, muss mit dem Trimm korrigiert werden. Auch bei leichten Kurven muss der Steuer-Knüppel immer auf Position gehalten werden. Alternative ist, die Neutralisierung des Knüppels zu entfernen. Er hat mir dann eine kleine Zeichnung zugestellt, damit ich begriffen habe, was er meinte! Habe das heute mal umgesetzt. Ist aber erst ein erster Prototyp, am Design muss noch gearbeitet werden. Generell klappt das aber. Vorteil: Der Steuerknüppel steht immer so, wie Ruder gelegt ist. Der Knüppel bleibt auf Position, also keine Neutralisierung. Mit Stellschrauben kann der Ruderanschlag StB und BB eingestellt werden. Kleines Dreh-Poti für den mittigen Trimm ist noch vorgesehen. Das ganze passt wieder für F14, FC-16 und FC-16 N&T. Kein Eingriff in die Elektronik des Senders. Die Alu-Teile werden Pulverbeschichtet. Das Ganze wirkt ein wenig Maritimer. Hier noch die Bilder! Was meint Ihr dazu?



-
Hallo Freunde, ich habe durch einen netten Kollegen günstige eine Graupner MX-12 40 MHz mit Empfänger R 700 bekommen? Frage? Gehen damit alle 40 MHz Empfänger oder nur die von Graupner oder nur der R 700? Hintergrund: Ich möchte für jedes Schiff einen eigenen Empfänger. Und die Quarze? Passen da alle 40 MHz Quarze oder nur die von Graupner? Danke Diddy
-
Kommentare zum Umbaubericht robbe F14 auf Servo-Reverse
Arno Hagen posted a topic in Comments to Building reports: Ships
Hier gerne Anregungen, Kritik, Kommentare zum Umbaubericht robbe F14 auf Servo-Reverse! -
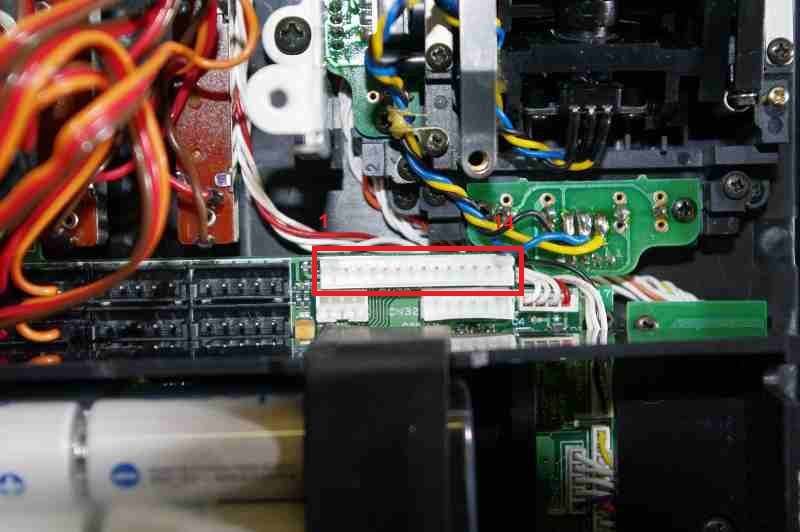
Moin liebe Gemeinde! Ich möchte meine robbe FC-16 Boat 'n Truck auf 2,4GHz umrüsten. Ich habe mich für das Universalmodul von EZC entschieden. Leider gibt es von der FC-16 Boat 'n Truck noch keine Umbauanleitung. Nur für die F14, die aber eine andere Platine hat. Müsste aber auch bei der FC-16 Boat 'n Truck gehen, da sie eine Trainerbuchse hat. Was ich nun suche, ist das PPM-Signal. Bei der F14 ist da eine Drahtbrücke, die man auftrennt und das Modul schaltbar dazwischen schaltet. Nun habe ich zwar eine Umbauanleitung für das Jeti-Modul gefunden, dass ähnlich funktioniert, aber leider nur für die alte FC16, die auch eine völlig andere Platine hat als die FC-16 Boat 'n Truck. Hat schonmal jemand seine FC-16 Boat 'n Truck umgerüstet oder kann bei der Signalsuche weiter helfen? Hier noch der Link zur Seite auf der man sich die F14-Anleitung als PDF runter laden kann! Eine Anfrage bei Eder-Modelltechnik ergab nur, dass es prinzipiell gehen müsste, die Steuerung aber nicht bekannt ist.
-
Da ich in der Vergangenheit oft die Frage gestellt bekommen habe, wie man die Drehrichtung von Servos auch ohne einen Computersender ändern kann und ich letztens meine F14 auf 2,4GHz umgerüstet habe und gleich auf "Servo-Reverse" umgerüstet habe, versuche ich hier mal eine Umbauanleitung zu schreiben. Ich hoffe sie ist allgemein verständlich. Fragen können im gesonderten Kommentar-Thread gestellt werden. Was ist "Servo-Reverse" und wozu brauche ich das? Servo-Reverse bedeutet nichts weiter, als die Drehrichtung des Servos um zudrehen. Je nach Einbauart des Servos oder nach Servohersteller dreht der Servo nicht in die Richtung die man von der Steuerknüppelbewegung erwarten würde. Bestes Beispiel: Bei meinen Seglern "Spered Avel" und "Ghostwind" laufen die Servos genau entgegengesetzt: Spered Avel: Steuerknüppel zu mir hin => Segel wird heran gezogen (dichtgeholt) Gohstwind: Steuerknüppel zu mir hin => Segel wird (durch den Wind) vom Bot weg bewegt (gefiert) Bei einem weiteren Boot funktioniert das Ruder genau gegenläufig zu allen anderen meiner Boote. Da sind Havarien vorprogrammiert! Wie kann man sich helfen? Ganz einfach: Einfach den Sender öffnen und den Stecker vom entsprechenden Steuerknüppel umdrehen! Originalzustand: Und umgedreht: Wo findet man die Stecker in der F14? Hier: Nun ist es mir zu aufwendig, jedes mal, wenn ich das Modell wechsele, die Funke auf machen, Stecker drehen und funke wieder zu machen. Abhilfe würde ein Computersender machen, wo man das per Menü und Knopfdruck macht. Aber es gibt auch eine Lösung für Nicht-Computer-Sender wie meine geliebte alte F14: Einfache Umschalter! Einfach? STOPP! Es sollten eben nicht einfache sein! Um ein versehentliches Umschalten während des Betriebes zu verhindern, sollten sie unbedingt verriegelbar sein!! Man findet sie bei diversen Elektonikanbietern im Internet. Ich habe meine von Eder Modelltechnik bezogen, da die Qualität der Schalter hervorragend ist und deutlich billiger als zu Beispiel bei Conrad. So sehen die aus und sind auch im Umbaubericht FC-16 B&T / F14-Navy auf 2,4GHz EZC-Universalmodul zu finden: Wird Fortgesetzt! Kommentare bitte hier!
-
Hallo zusammen weiß jemand von euch, ob es funktioniert zwei 2,4GHz Systeme in eine Fernsteuerung (in meinem Fall in eine Graupner MC-22) einzubauen und mittels HF-Umschalter zwischen denen hin und her schalten kann, wie man es braucht? Habe bis jetzt nur info´s gelesen das es mit 35/40 MHz und 2,4 problemlos funktioniert. Aber müsste doch auch funktionieren??
-

Erweiterung und Einstellung der MC-22 und Empfänger
jochen82 posted a topic in Sender, Empfänger, Module
Hallo zusammen, da mein Vater schneller in seiner Werft arbeitet, als ich die Teile heranschaffen kann - fängt das zweite elektronische Kapitel an. Ich habe meine Graupner MC-22 meinem Vater für seine entstehende Seabex One vermacht. Um alle Funktionen damit verwenden zu können, muss diese erweitert werden und Empfänger sind da auch nötig. Ich hatte bisher immer nur 8Kanäle verbaut, dies reicht in diesem Modell leider nicht mehr aus und deswegen hoffe ich, dass ihr mich ein wenig hierzu beraten könnt. Hier die Funktionen die eingebaut werden/sind: 1.Antrieb durch 4Motoren, zwei Motoren = jeweils einen Navy 30R Regler 2.Zwei Servos für die Lenkung der Ruder(propeller) 3.Über einen Schalter sollen die Propeller mit einem oder zwei Reglern reguliert werden 4.auch die Servos (Lenkung) sollen zusammen und getrennt geschalten werden können. 5. Antrieb der Strahlrohre am Heck mit einem (zwei) Navy V30R 6. Der Kran hat drei stufenlose Regler, welche die Drehung, die Neigung und die Seilwinde regeln. 7.Verschiedene Lampen/Lichter einschalten 8.weitere Funktionen Helikopter, Winde, Radar Jetzt stelle ich mir so einige Fragen: -Kann ich mehrere Empfänger Reihe schalten? (Ich habe das schon Mal gesehen, bin mir aber nicht sicher wie und wiviele Empfänger) -Welche Schalter/Regler empfehlen sich? -Sind die Nautic-Multi-Prop und Nautic-Module nötig/sinnvoll? -Wie stelle ich in der MC-22 ein, dass ich Funktionen zusammenfasse (Ruder/Antrieb) -Wo bekomme ich die Bauteile für einen vernünftigen Preis her, qualitativ gleichwertige Komponenten zu Graupner (kann, muss nicht) Vielen Dank schon Mal im Voraus, Gruß Jochen -
Umbaubericht robbe F14 Navy und FC-16 Boat 'n Truck auf 2,4GHz EZC Universalmodul
Arno Hagen posted a topic in Building reports: Ships
Ich habe meine robbe F14 Navy und meine robbe FC-16 Boat 'n Truck auf das 2,4GHz EZC Universalmodul von Eder-Modelltechnik umgebaut. Die genaue Bezeichnung: EZC.TECHNOLOGY 8 Kanal 2.4GHz System V2.2 DE UNIVERSALMODUL Da der Einbau von Modulen anderer Hersteller ähnlich erfolgt, soweit sie für den Einbau an Lehrer/Schüler-Buchen (auch Trainerbuchsen genannt) vorgesehen sind, ist der folgende Bericht sicherlich auch für Andere hilfreich. Mir war dabei sehr wichtig, zwischen 2,4GHz und 40MHz umschalten zu können, da ich nicht alle Schiffe auf 2,4GHz umstellen möchte oder wenn, zu einem späteren Zeitpunkt. Und ich gehöre zu der Fraktion, bei der jedes Schiff seinen eigenen Empfänger erhält. Zunächst die verbauten Materialien: Oben im Bild, der nicht im Lieferumfang enthaltene, aber auch bei Eder-Modelltechnik zu beziehende verriegelbare Umschalter um zwischen 40MHz und 2,4GHz umschalten zu können. Auf eine Verriegelung sollte man unbedingt achten, um nicht versehentlich zwischen 2,4GHz und 40MHz umzuschalten! Ich habe ihn fertig konfektioniert gekauft, da der geringe Mehrpreis in meinen Augen gerechtfertigt ist und für das 2,4GHz EZC-Modul schon eine Buchse dran ist. Das 2,4GHz Modul braucht man einfach nur da rein stecken (die Kabel sind ab Hersteller beschriftet) und kann den Teil des Anschlusses des Moduls schon mal vergessen. Unten im Bild, das EZC Universalmodul, das mit Antenne und schon angeschlossenen Komponenten geliefert wird: Antennenbuchse, zweifarbige LED rot/grün (Duo-LED), Bind-Taster und Servo-Buchse für den Anschluss an den oben genannten Umschalter. Der, im Bild zu sehende, Servo-Stecker ist für den Umbau überflüssig und stellt die spätere Verbindung zum 40MHz-HF-Teil der Steuerung dar. Der Minuspol ist schon zwischen allen 3 Abgängen gebrückt und so muss nur eine Minus-Verbindung zur Platine der Sender hergestellt werden. Bei der Kabelbelegung gilt: ROT = Plus (+9,8V) SCHWARZ/BRAUN = Minus (Masse) ORANGE/WEISS = PPM-Signal (Impuls-Leitung mit den Steuersignalen von den Kreuzknüppeln, Schaltern und Schiebereglern - bedingt auch von Multiswitch-Modulen) Bei der Duo-LED ist es etwas vertrackter: SCHWARZ = Anode Rote LED (+) = Langer Draht der LED ROT = gemeinsame Kathode (-) = Kurzer Draht der LED = Abgeflachte Seite des LED-Gehäuses (sofern keine Duo-LEDs verwendet werden) WEISS = Anode Grüne LED (+) = Langer Draht der LED Bitte diese Belegung nur für die LED berücksichtigen!!! Einzige Kritik: Der Taster und die LED sind in der Bauform für den Einbau nicht zu gebrauchen. Oder eher was für die Heißkleber-Fraktion. Die Komponenten werden durch handelsübliche Bauteile ersetzt, die sich problemlos in ein Kunststoff- oder Metallgehäuse einbauen lassen. Der verriegelbare Umschalter macht dafür einen um so besseren Eindruck: In den beiden folgenden Bauberichten werden Lötstifte (auch Lötnägel genannt) erwähnt die ich verwende. Diese haben einen Durchmesser von 1mm und mit den passenden Lötsteckern lassen sich hervorragend zuverlässige Steckverbindungen herstellen. Das hat den Vorteil, dass man schnell die Komponenten ändern, tausche und ersetzen kann. Und es erleichtert ungemein die Fehlersuche. Wie oft verabschiedet sich gerne ein Lötpunkt auf der Platine, nur weil man bei der Fehlersuche mehrmals was ein- und aus-gelötet hat! Als nächstes erfolgt der Umbaubericht der F14 Navy, im Anschluss der der FC-16 Boat 'n Truck. Kommentare bitte hier! -

Schalter für zusätzliche Kanäle - Graupner MC-10
Dampferkapitän posted a topic in Sender, Empfänger, Module
Hallo zusammen! ich habe auf der Platine meiner Fernsteuerung noch die Kanäle 6 und 7 frei. Auf den Kanal 6 möchte ich einen 2-Kanal Schalter legen und auf den Kanal 7 einen 2-Kanal Taster. (AN-AUS-AN) Bei Graupner ist solch ein Schalter unter der Bezeichnung "2-Kanal Schaltmodul 4171" erhältlich. Da ich aber Schalter und Taster hier liegen habe, möchte ich diesen nicht kaufen. Auf der Platine der Fernsteuerung befinden sich pro Kanal drei Pins. Ich würde jetzt einfach den mittleren Pol des Schalters mit dem mittleren Pin auf der Platine verbinden. Die zwei äußeren Pole des Schalters dann mit den äußeren Pins auf der Platine. Ist meine Überlegung so richtig? Muss noch ein Widerstand am Schalter/Taster angelötet werden? -
Ich habe mich entschlossen, die Technik aus meiner F14 in ein neues Gehäuse zu versetzen, nachdem ich die neue Schottelsteuerung von RC-Schottel erhalten habe. Mit diesem Schritt verfolge ich das Ziel, die Schaltelemente ergonomisch sinnvoller anzuordnen. Ausserdem will ich die Funke auf 2.4GHz umrüsten...mir schwebt das Jeti-Modul vor. Für die Planung stellen sich mir zwei grundlegende Fragen: Welche Anforderungen muss ein Selbstbau-Gehäuse erfüllen (Material, Abschirmung, etc.)? Muss ich bei der Planung der Anordnung der Komponenten etwas beachten, oder kann ich alle Teile des Senders beliebig stellen? Wer kann mir helfen?
-
Hallo, mein Vater würde gerne seine F-14 wieder funktionsfähig haben, und lässt mich nicht dran . Also suche ich jemanden, der das Teil reparieren, auf-/ und umrüsten kann. Gemacht werden soll: - Umrüstung auf 2,4 Ghz - Akku soll getauscht werden gegen Eneloops - Einbau eines Navy Twinsticks - Ausbaumodul richtig verkabeln Am besten jemand, dem wir die Anlage selbst vorbei bringen können, und eventuelle fragen persönlich geklärt werden können. Gebe es jemanden, der dies machen könnte? Wenn ja eine PN mit einen Kostenvoranschlag an mich. Für Fragen, stehe ich natürlich zur Verfügung. Gruß Tim
-
Fa. Robbe startet doch auch schonmal mit einigen guten Ansätzen bei ihrer neuen Fernsteuerung... http://www.robbe.de/content_global/images/robbe-erleben/newsletter/Newsletter_Telemetrie_2011.pdf
-
Mal ne ganz andere Richtung. Wie wär's mit einer Äääp fürs kluge Fon, mit Anschlus an einen Sender über USB? Durchaus ernst gemeint.