Search the Community
Showing results for tags 'elektronik'.
-
SMX Graupner 3971 an HoTT20 Funktionen aktivieren
Socceroo posted a topic in Sender, Empfänger, Module
Ich bräuche mal einen kompetenen Rat bezüglich folgendem Problem: Gegeben sind Fernsteuerung: Graupner HoTT20 Empfänger: Graupner GR12 Multi Funktionsschaltmodul SXM 3971 (Keine Jumper für L1-L4= Ein/Aus speichernd) Stromversorgung: Hyperpack5000 7,2 Volt NiHM Kanalbelegung: K1 Vorwärts/ Rückwärts, K4 Links/ Rechts und in K5 steckt das Schaltmodul Alle Lampen (Keine LEDs) leuchten bei direktem Anschluß an die Spannungsversorgung, funktionieren also einwandfrei. Ein Defekt der Lampen kann also ausgeschlossen werden. Ein Fehler bei der Verdrahtung kann ich ebenfalls ausschliessen. Aufgabe: An der Fernsteuerung soll der Schalter SW5/6 gemäß Bedienungsanleitung des Schaltbausteines zur Ansteuerung von vier Lichtquellen genutzt werden. Sollverhalten: Ansteuerung der Schaltfunktionen gemäß Bedienungsanleitung (Minus kürzer als ca. 0,75 sec- L1 wird geschaltet, usw) Istverhalten: Bei Betätigen des Schalters SW5/6 wird keine Schaltfunktion aktiviert. Daher meine Vermutung, daß die Fernsteuerung in irgendeiner Weise noch eingestellt werden muß. Schalter und Funktionen zugeordnet werden müssen. Frage an die Runde: Wie macht man das? Was muß ich an der Fernsteuerung einstellen, damit die Lampen wie gewünscht mit diesem Schalter anzusteuern sind? Vielen Dank im Vorraus. -

Ein dritter Kreuzknüppel an der MC-20 HoTT?
Ralph Cornell posted a topic in Sender, Empfänger, Module
Hallo, Freunde! Ich hätte da mal eine Frage, die mich seit einiger Zeit juckt. Wie etliche von euch bestimmt auch ärgere ich mich darüber, daß praktisch alle Fernsteueranlagen nur ein Paar Kreuzknüppel haben. Heute habe ich ein wenig die Geduld verloren und einen meiner kleinen alten Kyosho-Sender geschlachtet. Das Kreuzknüppelaggregat ließ sich auslöten. Soweit, so gut. Der Potibereich des kleinen Dings liegt bei beiden Potis zwischen 0,16 Kiloohm bis 9,07 Kiloohm. Nun ist die Frage: Weiß jemand von euch, in welchem Bereich die Potis der MC-20 liegen? Was ich möchte ist: An meiner MC-20 zwei der praktisch nutzlosen 3-Positionsschalter totlegen und an deren Stelle das Kreuzknüppelchen einbauen. Und das Stecksystem für die Geber ist doch JST, oder? -
Nachdem ich schon diverse Multiswitche z.B. für meine Dx6i gebaut habe, schwebt mir schon seit längerem die Idee im Kopf einen Multiswitch zu basteln, den man wirklich universell in allen Anlagen benutzen kann und zwar unabhängig davon ob Graupner, Robbe.. bzw. auch 40MHz oder 2,4GHz. Eigentlich ist die Programmierung und auch der Rest schon fertig, leider war meine Lust an elektronischen Basteleien in letzter Zeit etwas begrenzt, bzw. auch der Gesundheit geschuldet. Heute hab ich mich hingesetzt und endlich mal einen Teil des Prototypen zuammengelötet. Ein paar technische Daten, bzw. Vorraussetzungen. - funktioniert mit allen Anlagen die intern mit 3,3V oder 5V und Poti´s arbeiten. - Es wird ein Propkanal benötigt, ggf. wie z.B. bei der Dx6i muss ein Kreuzknüppelpoti für den Eingang herhalten. Das lässt sich aber umschaltbar lösen. - Der Multiswitch muss auch mit Systemen wie FrSky, mit denen normale Multiswitche unabhängig vom nicht vorhandenen Syncsignal nicht zu Mitarbeit zu bewegen sind, funktionieren - 16 Kanäle (es sind aber nur 8 gleichzeitig schaltbar, da jede einzelne Schaltstellung in "Echtzeit" übertragen wird - Die Übertragung habe ich im Vergleich zu meinen alten Multiswitchen ziemlich verändert. Es wird nicht nur ein einzelner Ein-Aus-Impuls übertragen, wenn ein Schalter betätigt wird. Die Schalterstellung aller Schalter wird zyklisch gelesen und übertragen, d.h. Fehlschaltungen oder Störungen neutralisieren sich beim nächsten Zyklus von selber. Deswegen gibt es auch erstmal kein Memory, das ließe sich zwar programmieren, würde das selbstregulierende System aber wieder lahmlegen. - Übertragungszeit für den aktuell geschalteten Schalter sollte nicht deutlich länger dauern, als bei heutigen Multiswitchen. Das hängt leider an diversen Systemen die irgendwelche Einrichtungen im Sender oder Empfänger haben, welche Servozittern verhindern sollen. - Die zyklische Übertragung dauert relativ lange, da ja 16 "Kanäle" übertragen werden müssen. Ich rechne da gerade so mit ca. 1,6s. Das ist aber auf jeden Fall immernoch Faktor 5 schneller als eine Fehlschaltung manuell zu beheben. - Den Dekoder gibt´s erstmal nur als 250mA Version mit ULN Treibern, ganz einfach weil ich nicht mehr brauche, da bin ich Egoist . Aber vielleicht findet sich ja noch jemand, der ein Layout mit FET´s malen will. Die HEX-files, Layout´s... wird es (wenn der Multiswitch fertig ist) hier oder auf meiner HP für jedermann zum download geben. So kann sich dann jeder seinen eigenen UNISWITCH16 (so hab ich das Ding mal getauft) selber bauen. So und nu bin ich offen für weitere Ideen, Anregungen... mal sehen was sich davon noch umsetzen lässt. Soweit der aktuelle Stand, Encoder mit frei verdrahteten Schaltern ist fertig, vom Dekoder gibt´s bisher nur eine Platine.

-
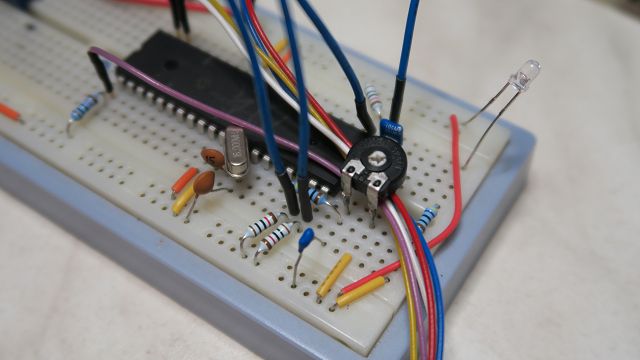
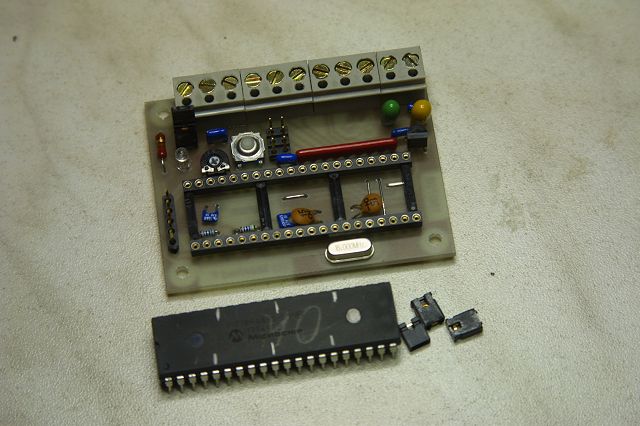
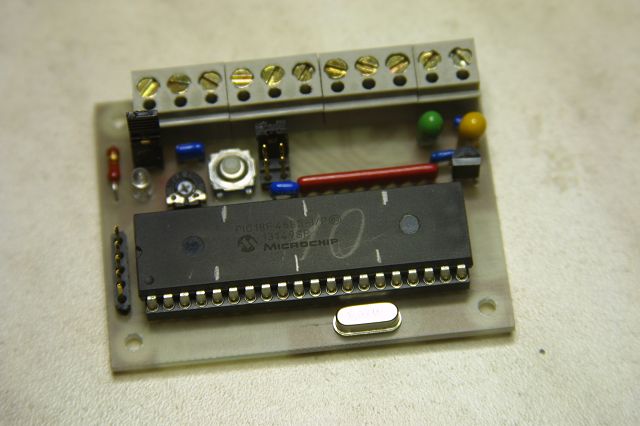
Hallo. Für meine STABERHUK habe ich einen Soundplayer für ein Typhon gebaut. Diesen Soundplayer möchte ich hier für den Nachbau vorstellen. Die Beschreibung des Prototypen und weitere Informationen findet Ihr hier. Hardware Beschreibung meines WAV-Player mit PIC18F4685 Der WAV Player spielt die Sounds von drei verschiedenen Typhons ab. Die Sounds sind im Flash Speicher des PIC Controllers als WAV-Datei mit 8 bit Mono 16kHz abgelegt und werden auf Knopfdruck wiedergegeben. Zum Abspielen über einen Lautsrecher ist ein Verstärker erforderlich. Die Lautstärke kann über einen Trimmer eingestellt werden. Die Sounds sind fest im Programm eingebunden und können nicht ohne weiteres verändert werden. Eine Kontroll-Led leuchtet während der Soundwiedergabe und kann bei Bedarf über einen Jumper abgeschaltet werden. Anschlüsse: 1. Stromversorgung: Der Player enthält einen 100mA Spannungsregler welcher den Controller mit 5 V versorgt. Er kann daher mit 5 V oder mit 12 V (8 - 16V) betrieben werden. Klemmen hierfür: +12 V oder +5 V und GND (Masse). 2. Audioausgang: Der Verstärker wird an den Audioausgang angeschlossen. Klemmen hierfür: Audio und GND. 3. Soundwiedergabe: Auf der Platine des WAV-Players befindet sich eine Taste. Diese ist parallel zum Eingang SND 1 geschaltet. Wird diese Taste gedrückt, oder der Eingang SND1 auf +5 V gelegt, so wird der Sound abgespielt. 4. Reserveeingänge: Die Eingänge SND2 bis SND5 sind Reserveeingänge des WAV Players für evtl. andere Sounds und werden beim Typhon nicht gebraucht. 5. Programmieranschluss: Neben dem PIC Controller befindet sich ein 5 poliger Pfostenstecker. Dies ist der Programmieranschluss für den PIC Kontroller. Hier kann ein neues oder geändertes Programm in den Kontroller geflasht werden. Soundauswahl über Jumper: Über drei Jumper können die Sounds und das Verhalten ausgewählt werden. Je nach Jumperstellung kann jeder Sound entweder einfach oder als Endlosschleife, solange die Taste gedrückt bleibt, abgespielt werden. Folgende Sounds sind abspielbar: Jumper 1 gesteckt: Leslie125 8bit mono 16kHz Einfach Jumper 1 und 2 gesteckt: Leslie125 8bit mono 16kHz Schleife Jumper 2 gesteckt: Kahlenberg 8bit mono 16kHz Einfach Jumper 2 und 3 gesteckt: Kahlenberg 8bit mono 16kHz Schleife Jumper 3 gesteckt: Nathan44 8bit mono 16kHz Einfach Jumper 1 und 3 gesteckt: Nathan44 8bit mono 16kHz Schleife Dateien: Folgende Dateien sind in diesem Projekt enthalten: - Schaltplan --> Schaltplan als Handzeichnung - Bestückungsplan --> Bestückungsplan der Platine - Platinenlayout --> TIF Datei des Layouts - Eagle-File --> Platinenlayout für EAGLE-CAD - Stückliste --> Stückliste für den WAV Player - C-Programm --> C-Quellcode des WAV Players - HEX-File --> fertig compilierte Datei die direkt in den PIC gebrannt werden kann - Include - Init --> Initialisierungsdatei für den PIC Kontroller - Include - Konfig --> Konfigurationsdatei für den PIC Kontroller - Soundfiles --> Sounds im h-Format zur Einbindung in das C-Programm - Beschreibung.txt --> Diese Datei Hier der Prototyp auf einem Steckbrett Unter dem Mikrocontroller befinden sich weitere Bauteile und ein paar Brücken Der fertige Soundplayer. Durch die Software wird er zum Typhon Platine des Soundplayers von Unten Ein kleines Filmchen erklärt nochmal den Anschluss und einige Funktionen Jeder Nachbau geschieht auf eigene Gefahr. Für Schäden die durch einen Nachbau entstehen übernehme ich keine Haftung. Jeder der dieses Typhon nachbauen möchte kann diese Dateien für den privaten Gebrauch verwenden. Eine komerzielle Nutzung ist verboten. Ich wünsche viel Spass beim Nachbau und bin gespannt auf eure Komentare. Viele Grüße aus dem Ruhrgebiet Manfred Von Moderator Antias bearbeitet Youtube Link wiederhergestellt. Typhon.zip
-

Welche Steckverbinder nutzt Ihr für Sonderfunktionen?
derManfred posted a topic in Schaltungen und Bauelemente
Hallo Für meine STABERHUK plane ich einiges an Sonderfunktionen. Dazu müssen mehrere Leitungen vom Mast über das Dach in den Rumpf verlegt werden. Da sowohl die Aufbauten, als auch das Dach des Führerhauses abnehmbar sind, müssen hier mehrpolige Steckverbinder benutzt werden. - Was benutzt Ihr dazu? - Befestigt Ihr die Steckverbinder, so das sie beim Aufsetzen der Aufbauten selbstständig verbinden, oder habt Ihr die lose mit längeren Leitungen im Rumpf liegen? - Oder wie sonst? Was mich so ein Bisschen stört, sind die relativ grossen Kräfte, die man bei vielpoligen Steckern aufwenden muß. Wenn man die trennt, gibt es immer einen Ruck. Gibt es da Alternativen? Mit einem freundlichen Glückauf aus dem Rurgebiet Manfred -
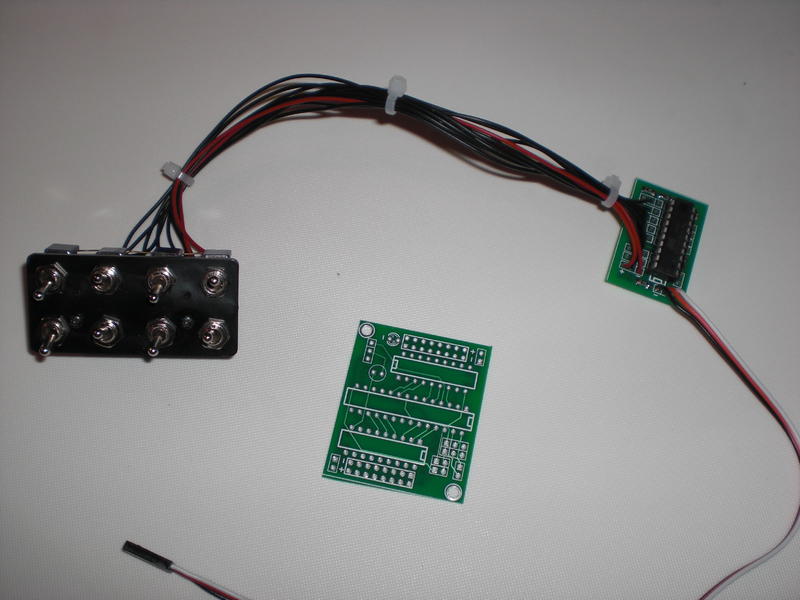
Hallo! Hab mir vor kurzem ein Schaltmodul entwickelt. Ursprünglich hatte ich mittels Taster an der Fernsteuerung mein CTI-Modul angesteuert. Dieses zählt ja die Impulse und schaltet danach einen Kanal. Mein Schaltmodul ist mit 4 Kipptastern ausgerüstet. Somit lassen sich acht Kanäle ohne zählen schalten. Der Pinabstand auf der Platine ist für Graupnereinbau vorgesehen. Es werden lediglich drei Kabel angeschlossen. Plus, Masse und Signalausgang. Ein separater Sync- Eingang ist nicht notwendig. Dadurch ist man nicht an einen bestimmten Hersteller oder Modell gebunden. Ebenso ist eine Verwendung bei 2,4GHz wahrscheinlich möglich. Kann ich aber nicht testen, weil ich keine 2,4GHz Systeme zum testen habe. Da mein Sender voll ausgebaut ist, war kein Modulplatz mehr frei. Das Schaltmodul passt aber über das Knüppelaggregat. Die Verbindung zu den Momenttastern erfolgt hierbei über Kabel. Eingebaut hab ich mein erstes Labormuster. Hat sogar auf Anhieb funktioniert. Dadurch hab ich jetzt einige Platinen übrig. Achso, es müssen keine Prozessoren programmiert werden. Es werden nur normale Bauteile verwendet. Die Schaltmodule von CTI sind auch bekannt und erhältlich. Wer Fragen hat, einfach melden. Gruß Mani



-
Wie kann ich ein Elektronikprojekt hier posten?
derManfred posted a topic in Schaltungen und Bauelemente
Hallo Ich würde gern einige eigene Elektronikschaltungen für den Schiffsmodellbau hier posten. Aber; ein Elektronikprojekt z.B. mit einem Mikrocontroller besteht aus mehreren Dateien. - Schaltplan - Schaltungsbeschreibung - Platinenlayout - Stückliste - Bestückungsplan - Software im Quellcode - Software als Hex-Datei - etc... Wie kann ich solch ein Projekt hier posten? Eine ZIP-Datei, die alle oben genannten Dateien enthält, wäre am besten, geht aber wahrscheinlich nicht!? Ich habe jedenfalls noch keine Möglichkeit dafür gefunden. Wer weis Rat? Mit freundliche Grüßen Manfred -
Hallo , Ich denke das ich es mal wage euch eine Blauzahn (BZ) ( ähnlich wie die SA1000 von Scaleart ) vorzustellen. Wie schon vor Langer zeit angefangen wurde in einen anderen Topic Die Scaleart Variante angefangen wurde und man sich irgendwo nicht einig war was , wieso und vor allem warum, habe ich mal angefangen euch hier mal eine kleine Zusammenfassung zu schreiben, zum einen was ich an Erfahrung gemacht habe und zum anderen wie das Projekt weiter gehen soll bzw. wird. Angefangen hat es nach meinen Informationen Bei einer Veranstaltung eines Hamburger Modellbau Vereins ( Truckmodellbau ) was dort sehr schnell die Runde machte. Wie man ja sehen konnte, hat sich die Fernsteuerrung sehr gut entwickelt in der Truck und Baggermodellbau Szene. Sender Galerie Da ich zur einer IG gehöre die sich nicht nur im Truckmodellbau sondern auch im Schiffsmodellbau zuhause fühlt, habe ich mit dem Entwickler gesprochen und ihn mal gefragt wie es bei den Schiffen aussieht. Eine Antwort lies mich dann aufhorchen " Ich habe keinen der es testen könnte da ich zu viel zu tun habe und ich selber habe zur zeit kein Modell ". Ich habe angefangen Meine Weser ( Übernommen von einen Kollegen ) auf die Blauzahn umzustellen. " Einiges kann man HIER nachlesen " Der Sender sowie auch die Empfänger ( es Gibt 2 ) war von Anfang an als ein Bausatz zusehen und nach dem Motto "Zeigt her eure Schuh" wurden dann wie oben schon beschrieben die einen oder anderen Sender gebaut. Um vom Schiffchenbauer ( Lothar ) die Frage aufzugreifen " Erfahrungswerte und als Selbstbau " Was den Umbausatz von Scaleart " Commander-Basic-Sendemodul " betrifft, ist das ein Zwischending der ersten BZ und der BZ-Plus. Der erste Blauzahn Sender war ausgestattet mit 7 Proportionalkanäle und 8 Schaltern ( 16 Funktionen max. ) Der Plus Sender bringt es derzeit auf 12 Proportionalkanäle und 16 Schalter ( 32 Schaltfunktionen max.) und hat auch ein Größeres Display. Nach der Umentwiklung der BZ-Plus kommen beide Anlagen mit einer Versorgungsspannung von 4,8 - 7,4 Volt lange mit aus. Der derzeitige Standard Empfänger hat 11 bzw. 13 Proportionalausgänge und 6 bzw. 8 Schaltausgänge. 2 Ausgänge sind wahlweise schaltbar. Das Caos bitte ich zu entschuldigen So könnte der neue Empfänger aussehen 12 Servos und 16 Schaltfunktionen, was für ein Funktionsmodell ausreichen sollte, wobei ich dazu sagen muss das eine weitere auswerte Einheit in beiden Fällen möglich ist. Der derzeit erhältlicher Sender ist der BZ-Plus mit derzeit 12 Proportional und 16 Schalteingängen Was den Preis und vor allem der Aufwand angeht muss jeder für sich wissen ... Preise sind Hier und Hier ( noch im Aufbau ) erhältlich. Fahrpraxis: Was ich schon erfahren habe ist, das die Reichweite nicht grade die Hunderte von Meters sind jedoch sollte man sich fragen wie viele Meter muss man erreichen ? Wenn ich ein Funktionsmodell fahre dann möchte ich es auch schon sehen was das Modell macht da sehe ich eine Zahl von 20-30 Meter als realistisch an. Was jetzt nach meiner Meinung interessant sein wird ist , wenn ich die Antenneneinheit umbaue . Derzeit liegt sie fast auf Wasser ebene was schon ein gewaltiges Problem dargestellt hat. Mein persönliches Fazit derzeit ist, die Anlage ist wirklich was für Modellbauer die auf reine Funktionen aus sind. Kollegen die zB. die Adolf Bernpohl oder Ähnliches haben, für die wäre sie interessant, den mit einen Sender, mit einen Tastendruck zwischen 2 Modellen hin und her schalten das findet man selten bis gar nicht. bei Speed booten würde ich es persönlich nicht empfehlen. Segelschiffe wird sich zeigen, da ein Kollege von mir eins grade aufbaut. Mein Wunsch wäre, wenn sich der eine oder andere noch finden Würde. Ich würde gerne weiter über die erfahrung mit der Blauzahn berichten. wichtig sei noch zu erwähnen, die anlagen von Scaleart sind Identisch mit der Blauzahn da sie das selbe Protokol verwenden. ich verbleibe erstmal mit einen Gruss Thomas
-

Rückwärtsgang mit brushless outrunner mit roxxy 940-6sv?!
Guest posted a topic in Servos und Fahrtregler
Liebe Käpt'ns! Und auf die es zutrifft: Herzlichen Glückwunsch zum Vatertag! Ich habe mit einen Antriebsstrang für eine alte runtergekommene Adolph Bermpohl zusammengekauft: 2xBrushless Outrunner 4250 540Kv weitere Motordetails weiter unten 2x roxxy 940-6 sv LiFePo4 10Ah (Headway) Sender DX8 Spektrum Empfänger 6-Kanal Spektrum (Ich weiß: 6-Ch ist für die AB mager, aber ich will erstmal nur Grundfunktionen Jetzt habe ich mal alles zusammengebaut und stelle fest, dass ich nicht auf "Rückwärtsgangtauglichkeit" geachtet habe. Beim Regler ging ich davon aus, dass er vor und zurück hinbekommt. Kann mir jemand hier weiterhelfen (Muss ich ggf. versuchen, die Regler umzutauschen)? Danke schonmal Stefan -
Hallo Miteinander Ich lese schon eine weile mit und werde bald auch mal einen Baubericht oder so schreiben. Ich werde dort dann auch eine kleine vorstellung machen. Für mein aktuelles Projekt habe ich mir beim grossen C den 7 Kanal Multiswitch welcher über 2 Prop Kanäle gesteuert wird gekauft. Die Kanäle werden über die Knüppelposition ein und aus geschaltet. Also z.B. oben mitte oder oben links ist jeweils ein Kanal. Das Problem ist jetzt folgendes: Mit dem Jamara 2,4 GHz Sender Funktionierts einwandfrei. Mit der neuen Turnigy 2.4GHz Steuerung die ich verwenden wollte ist es jedoch so das sich zwar etwas schalten lässt aber nur im unteren rechten bereich des Knüppels. (Dort lassen sich beinahe alle Kanäle schalten aber das auf irgendwelchen Knüppel Positionen) Leider kenne ich mich zu wenig mit Sendern aus und frage mich was der unterschied zischen den beiden sein kann. Servos Funktionieren ja bei beiden gleich. Gruss Manuel
-
Moin Moin, mein Sohn und ich möchten den Mast der Adolph Bermpohl neu bauen und mit LED`s ausrüsten für eine möglichst originale Beleuchtung, haben aber so gut wie keine Erfahrung mit LED´s sowie deren Anschluß. Die Bermpohl haben wir gebraucht ersteigert. Wir haben die Fernbedienung Graupner FC-16 Boat´n TrucK: wir denken , die Positionslampen und Scheinwerfer mit dem Lichtmodul zu schalten oder mit dem Multi-Switch-Prop- Modul. Für den Antrieb steht im Schiff ein 12 Volt PB Akku mit 7 AH. Und für die restliche Bordelektronik (Empfänger, Servos, Beleuchtung) haben wir einen 6 Volt PB Akku mit 4,5 Ah Stunden. Die Bermpohl fährt nun schon mal mit 3 Motoren, die mit jeweils einem Fahrtenregler ausgestattet sind, um den Mittelmotor bei Bedarf zuschalten zu können bzw. die äußeren Motoren gegenläufig zu steuern. Nun wollen wir die Beleuchtung in Angriff nehmen und kommen nicht so recht weiter. Da wir blutige Anfänger sind würden wir uns freuen wenn jemand weiterhelfen könnte. VG Luftikus
-
3 downloads
Es wird der ESC Kanal vom Empfänger ausgewertet. Bei Vorwärtsfahrt wird der Servo an einen Anschlag gefahren, bei Rückwärtsfahrt wird der Servo automatisch an den anderen Anschlag gefahren und das Motorensignal als Vorwärtssignal ausgegeben. Dazu sind noch folgende Features wichtig: Der Servokanal muss reversible sein, und man muss den Weg einstellen können, am besten man kann die beiden Position direkt per Fernbedienung programmieren. Auch der Motorkanal sollte einstellbar sein, damit man z.B. auch günstigere Flugregler verwenden kann. Der Empfänger wird vom Pin 2 gelesen, die Ausgänge liegen auf Pin 9 (Klappenservo) und 10 (ESC). Am Anschluss 5 wird ein Taster (PRG) gegen Masse angeschlossen. Im Programm gibt es einen Programmiermodus, wenn der Taster PRG beim Einschalten gedrückt wird. Dann können die beiden Positionen des Klappenservos und die minimale und maximale Ansteuerung des ESC's gespeichert werden. Zunächst muss die obere Position gespeichert werden, dazu die Steuerung auf den gewünschten Wert einstellen und PRG drücken. Zur Quittierung blinkt die Board-LED. Danach wird die untere Position angefahren und genauso gespeichert. Jetzt die maximale Stellung des ESC, und danach die Minimalposition. Der Programmiermodus wird dann automatisch verlassen. Die Werte für die Klappe und den ESC werden im EEPROM abgelegt und beim erneuten Start auch wieder gelesen. Die minimale Position steht im EEPROM in der Adresse 0, die maximale Position an Adresse 1. (Es ist dabei völlig egal, welchen Wert die untere bzw. obere Position tatsächlich haben. Unten definiert nur den Rückwärtsbetrieb. Wie der Servo dabei stehen muss, ist völlig egal. Es wird beim Speichern einfach die programmierte Position angefahren. Das gleiche gilt auch für die andere Position.) Adresse 3 enthält den ESC Max Wert und 2 den ESC Min Wert. Weiterhin kann im Programm auch der ESC bei Rückwärtsfahrt auf halbe Leistung geschaltet werden. Dazu dient der Compilerschalter HALF_BACK_THROTTLE. Ich hab das ganze auf einer Lochrasterplatine mit Mega328 aufgebaut. Das Programm kann aber auch auf einem Tiny85 laufen. Zum Beitrag im Forum -
Ahoi und einen schönen Sonntag Nach vielen Diskussionen hier im Forum, bei welchen ich mich auch beteiligt habe, ist immer wieder das Problem des Drehens von "Unendlich x 360 Grad" angesprochen worden. Wie Ihr alle wisst, bin ich daran geblieben und genau deshalb ist es etwas stiller geworden. Die Idee einer Realisierung war da, hatte aber mit einigen Tücken zu kämpfen. Dank meinem lieben Freund Hans, ja auch Hans, haben wir aus der Idee ein gemeinsames Projekt generiert. Hans habe ich in einem CNC-Forum kennengelernt und er hat mir damals die geniale Atmel-Leuchturm-Steuerung gebaut. Beim Projekt-Beginn haben wir viele Parameter besprochen und ein Konzept ausgearbeitet, da Hans und ich in verschiedenen Ländern wohnen. Die heutigen Kommunikations-Wege lassen so ein Projekt auch über Entfernungen entstehen. Die vielen Zeichnungen, Pläne, Skizzen, Schemata und Print-Layouts haben wir über einen gemeinsamen FTP-Server verwaltet und damit sichergestellt, dass wir gegenseitig immer Up-to-Date waren. Und da waren seit dem Projekt-Start Mitte April noch 227 E-Mail’s, rund 50 MB Daten-Volumen, welche zwischen Deutschland und der Schweiz vermittelt worden sind. Folgende Voraussetzungen waren uns wichtig: Umbau Sender: Kreuzknüppel ausbauen, Schottel-Geber einbauen, d.h. keine Eingriffe in die Elektronik des Senders Auf der Empfänger-Seite wird das normale Servo durch die Schottel-Steuerung ersetzt, auch hier keine Eingriffe in Empfänger und im Signal-Weg Einbau und Einstellungen für jeden Anwender einfach und transparent, eingestellte Parameter werden dauerhaft im Schottel-Antrieb auf dem Chip gespeichert Schottel-Verhalten wie im Original, also kein Super-Speed-Servo, sondern die reale Abbildung eines Schottels, mit all seinen Mängeln (z.B. Laufzeit pro Umdrehung) Weg-Optimierung, d.h. der Schottel sucht den kürzesten Weg bei grossen Kurs-Aenderungen, läuft also im Maximum 180 Grad, in die entsprechende Richtung Kräftiger Servo-Motor, auch für grosse Schottel Die End-Lösung (Geber und Schottel-Servo) soll eine Low-Cost-Lösung werden. Wir haben uns dann aufgeteilt, Hans hat den Schottel-Antrieb gebaut und die recht komplexe Software entwickelt während ich mich mit dem Geber-Teil der RC-Steuerung beschäftigt habe und dabei die Programmierung von Micro-Prozi's in einem Cross-Kurs, zusammen mit meinem Mentor, erlernt habe. Das Ganze ist entstanden, ohne dass wir uns in dieser Zeit persönlich getroffen haben. Für mich war immer wieder verblüffend, wie Hans meine Ideen und Aenderungs-Wünsche umgesetzt hat. Einfach genial. Und ja, um die SMD-Technik sind wir dann halt auch nicht herumgekommen. Bilder: Schottel-Geber, noch nicht lackiert http://www.hamatro.ch/RC-Schottel/Schottel-Geber.JPG Schottel-Servo, Entwicklungs-Stand http://www.hamatro.ch/RC-Schottel/Schottel-Servo.JPG Springer-Tug, Test-Plattform http://www.hamatro.ch/RC-Schottel/Test-Springer.JPG Springer-Tug, "Unendlich x 360 Grad http://www.hamatro.ch/RC-Schottel/Schottel-Springer.JPG Das Video (ca. 10 MB) zeigt den Test-Aufbau unter dem heutigen Stand der Entwicklung. Ihr seht, es läuft bereits! Video: http://www.hamatro.ch/RC-Schottel/Demo-1.wmv Das System ist noch in der Phase Rest-Entwicklung, Optimierung und Test. Ueber die genaue Funktionsweise wollen wir hier nicht informieren, vielmehr werden wir versuchen, unseren ersten Prototypen am 7. August 2010, in St. Peter, live vorstellen zu können. Dazu werden wir eine Springer mit dem gut klingenden Namen: Unendlich x 360 Grad mitnehmen. Viel Spass! Hier noch die zwei Links der Entwickler: Hans 1: http://www.roehrenkramladen.de/ Hans 2: http://www.hamatro.ch/wetter.htm
-
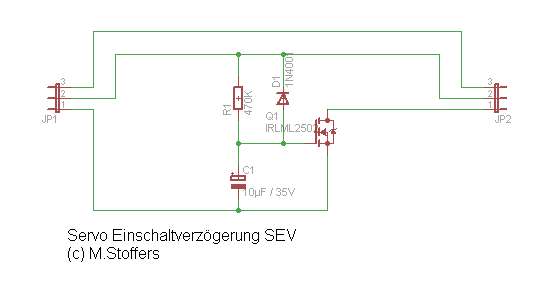
Hallo und guten Abend, wie im Klönsnack schon angedeutet, möchte ich meine Elektronik Bastelleien hier in loser Reihenfolge mal einstellen. Beginnen wollen wir heute mit einer Servo Einschaltverzögerung Wozu ? Nun ja, wir haben im Verein ein paar Sender - Empfänger Kombinationen, die beim Einschalten die Servos zucken lassen. Das ist gerade bei Sonderfunktionen sehr störend. Auch ein paar ältere 2,4GHz Systeme brauchen einfach ihre Zeit, bis das Binding klappt. Die Servos bekommen dann einen fehlerhaften Impuls und fangen an zu zucken. Wie funktioniert denn das ? Eigentlich ganz simple: der Servo wird erst mit 0,5s Verzögerung mit Strom versorgt und reagiert daher nicht auf den fehlerhaften Einschaltimpuls. Wie baut man das nach ? Die Schaltung ist recht simple und braucht nur 4 Bauteile. Über den Widerstand wird der Kondensator langsam aufgeladen, bis der MosFet irgendwann durchschaltet (nach ca. 0,5s). Über die Diode wird der Kondensator wieder entladen, wenn man den Strom abschaltet. Und wie schließt man das an ? Über JP1 wird die Schaltung mit dem Empfänger verbunden und an JP2 wird der Servo angeschlossen. So, die Schaltung habe ich angehängt. Wenn jemand die eagle Dateien dazu haben möchte (ist allerdings in SMD) möge er sich bitte melden. Viel Spaß beim Nachbau Marco [Edit] Schreibfehler korrigiert
-
Bei meinem kleines Jetboot (NQD Tear Into) mußte ich den Antrieb tauschen. Ich hab dann gleich die Chanche genutzt und einen Jet mit Rückfahrklappe (Graupner Minijet) montiert. Denn Rückwärts fahren kann das Boot so nicht. Und selbst mit Rückfahrklappe ist das nicht ganz einfach. Denn die Klappe wird extra gesteuert und man muss den Antrieb weiter vorwärtslaufen lassen. Dazu ist aber eine 3-Kanal Funke notwendig. Nun ist aber, m.M. nach, eine Pistolensteuerung ideal für das Gefährt. Die hat aber nur 2 Kanäle… So ein Dilemma, man müßte also die Klappe zusammen mit dem Motor steuern können. Das genau macht dieses Programm. Es wird der ESC Kanal vom Empfänger ausgewertet. Bei Vorwärtsfahrt wird der Servo an einen Anschlag gefahren, bei Rückwärtsfahrt wird der Servo automatisch an den anderen Anschlag gefahren und das Motorensignal als Vorwärtssignal ausgegeben. Dazu sind noch folgende Features wichtig: Der Servokanal muss reversible sein, und man muss den Weg einstellen können, am besten man kann die beiden Position direkt per Fernbedienung programmieren. Auch der Motorkanal sollte einstellbar sein, damit man z.B. auch günstigere Flugregler verwenden kann. Der Empfänger wird vom Pin 2 gelesen, die Ausgänge liegen auf Pin 9 (Klappenservo) und 10 (ESC). Am Anschluss 5 wird ein Taster (PRG) gegen Masse angeschlossen. Im Programm gibt es einen Programmiermodus, wenn der Taster PRG beim Einschalten gedrückt wird. Dann können die beiden Positionen des Klappenservos und die minimale und maximale Ansteuerung des ESC's gespeichert werden. Zunächst muss die obere Position gespeichert werden, dazu die Steuerung auf den gewünschten Wert einstellen und PRG drücken. Zur Quittierung blinkt die Board-LED. Danach wird die untere Position angefahren und genauso gespeichert. Jetzt die maximale Stellung des ESC, und danach die Minimalposition. Der Programmiermodus wird dann automatisch verlassen. Die Werte für die Klappe und den ESC werden im EEPROM abgelegt und beim erneuten Start auch wieder gelesen. Die minimale Position steht im EEPROM in der Adresse 0, die maximale Position an Adresse 1. (Es ist dabei völlig egal, welchen Wert die untere bzw. obere Position tatsächlich haben. Unten definiert nur den Rückwärtsbetrieb. Wie der Servo dabei stehen muss, ist völlig egal. Es wird beim Speichern einfach die programmierte Position angefahren. Das gleiche gilt auch für die andere Position.) Adresse 3 enthält den ESC Max Wert und 2 den ESC Min Wert. Weiterhin kann im Programm auch der ESC bei Rückwärtsfahrt auf halbe Leistung geschaltet werden. Dazu dient der Compilerschalter HALF_BACK_THROTTLE. Ich hab das ganze auf einer Lochrasterplatine mit Mega328 aufgebaut. Das Programm kann aber auch auf einem Tiny85 laufen.
-
Hm... ich glaube fast, man kommt für diese Anwendung an der Microprozessor-technik kaum vorbei, völlig egal, welche Anlage im Einsatz ist. Um das mal weiterzuspinnen, meine Idee dazu: Im Sender: Inkremental-Drehgeber -> Positions- und Richtungsauswertung im Prozessor -> Erzeugung eines Analogsignals für den Kanaleingang mittels I2C-Poti. ob man dann über die Pulslängen am Empfänger eine digitale Positionsinformation überträgt oder die Pulslänge direkt auswertet, sei mal dahingestellt... letzteres stelle ich mir etwas einfacher und schneller vor. Am Empfänger: PPM-Impuls (1...2ms) -> Auswertung im Microprozessor -> Ansteuerung Drehantrieb mit Inkrementalgeber oder Schrittmotor. Grüße Torsten