Search the Community
Showing results for tags 'antriebe'.
-

Kommentare zum Baubericht Rotortug RT80-28
Guest posted a topic in Comments to Building reports: Ships
Hier ist dann auch euer Platz für Anregungen und Kritik Gruß Christian Link zum Baubericht -
Hallo Ihr freunde des Fachwissens, ich bin am lesen und durchstöbern nach Infos, leider finde ich nicht das was ich brauche:(. 1. frage. Warum drehen sich bei grösseren Schiffen ein Prop links und einer rechts herum? Warum nicht beide in eine Richtung. Somit könnte ich zwei dieselben props kaufen. Bei verschiedenen Richtungen muss ich einen L+R kaufen. 2. Muss man jeden Motor an einem Fahrtregler stecker oder können beide Motoren über einen Regler laufen? In meiner Werft hat sich der Gedanke der Polarstern angefunden. Gruß aus Berlin Dieter
-
So Leute, nachdem ich im Sommer nun den Bau meiner Vegesack für abgeschlossen erklärt habe, hat mich doch die Lust nach einem neuen Modell gepackt. Dieses mal sollte es aber nicht wieder ein Modell von der Stange werden, sondern ich wollte endlich mal in die wunderbare Welt des Rumpfbaus einsteigen. Gut und nun welches Modell? Da kam mein Wunsch nach einem modernen, wendigen und starken Schlepper. Da Bremerhaven nur 10 Minuten mit der Fähre von mir entfernt liegt, bin ich also rüber gefahren um mir die neuen Schlepper von URAG an zu schauen. Die Teile sind echt der Hammer im Bezug auf die Breite. Man musste nun erst einmal wissen, was genau Rotortug ist. Da bin ich aber schnell auf genügend Informationsmaterial gekommen.http://www.rotortug.com/scripts/homepage.php Noch am selben Abend wurden noch Pläne besorgt für den Typ RT80-28 http://www.rotortug.com/scripts/rt80.php. (Quelle: www.rotortug.com) Gebaut wird das Baby in 1:50 und hat dann eine Länge von 56cm und eine Breite von 24cm. Mitlerweile sind die Spanten auch ausgedruckt und in Holzform bei mir in der Werkstatt Nachdem ich nun auch unzählige Bauberichte hier gelesen habe und mir das Buch von Jürgen Eichardt zu Gemüte geführt habe, fühlte ich mich in den letzten Wochen schlau genug den Bau zu beginnen:mrgreen: Spanten stehen alle und ich habe es eben gerade sogar noch geschafft eine Leiste anzu kleben:respekt: Nun werde ich die nächsten Tage Stück für Stück weiter machen und wäre dankbar, wenn einer von euch Fehler entdecken sollte, mir die mit zuteilen. Ich bin ja für jeden Tipp dankbar Nebenbei bin ich schon auf der Suche nach den richtigen Antrieben ( 3 Schottel). Ich bin unter anderem auf die von Kagelmacher gestoßen http://www.kagelmacher-modellbau.de/epages/62255885.sf/de_DE/?ObjectPath=/Shops/62255885/Products/08-003 Gibt es dort noch andere Versionen die ihr mir empfehlen könntet? Gruß Christian Lob und Kritik bitte hier Hier noch zwei Bild vom aktuellen Bauzustand:


-

Kommentare zum Bau eines Airboat / Sumpfgleiter / Swamp Boat
Ulmo posted a topic in Comments to Building reports: Ships
Hier könnt Ihr Kommentare zum Baubericht meines Sumpfgleiters hinterlassen. -
Hallo zusammen Von der Heli-Fliegerei habe ich einige Erfahrung mit BL-Motoren, von der Leistung her aber dicke und teure Dinger. Auch klar, bei einem Abflug-Gewicht von 7.5 kg :mrgreen: Nun beschäftige ich mich auch mit solchen Motoren für Schiffs-Modelle, u.A. auch für Schottel. Das ist Neuland. Gibt es einen Vergleich, z.B. 400er Motoren = BL-Motor (Leistung ?) Die Motoren sollten Drehmoment haben, aber nicht Drehzahlen, die uferlos sind. Such mich im Moment durch Google und Co., bin aber für Tips dankbar. Ideal wäre eine 12 Volt Maschine, Drehzahl ca. 12'000 - 15'000, Outrunner (von wegen Drehmoment und Kühlung).
-
Kommentare und Fragen zum Baubericht "Parat"
Guest posted a topic in Comments to Building reports: Ships
Hallo Steinbeisser, du kommst aber schön voran. Der Rumpfinneneinbau ist finde ich auch sehr schön, aber hast du die HOzplatten weiß gestrichen? und beim Gewicht würde ich im Bug noch etwas Luft lassen, da der AUfbau ja auch noch was wiegt. Baubericht ist hier. -
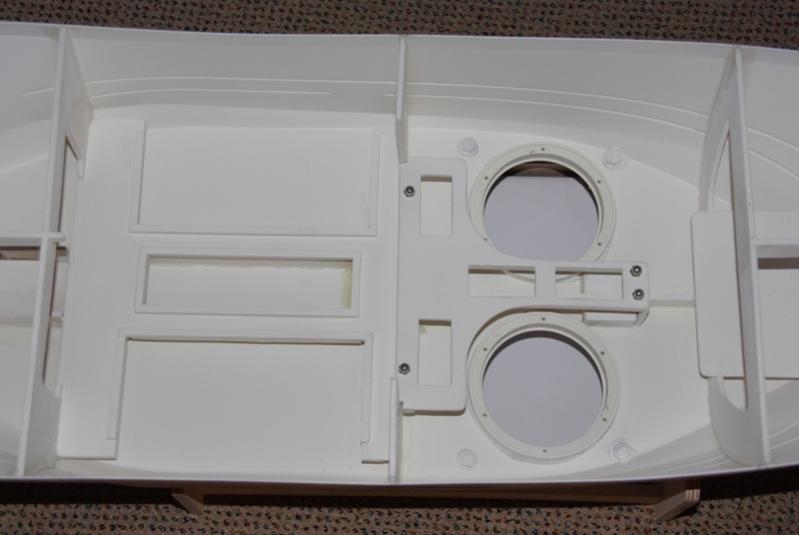
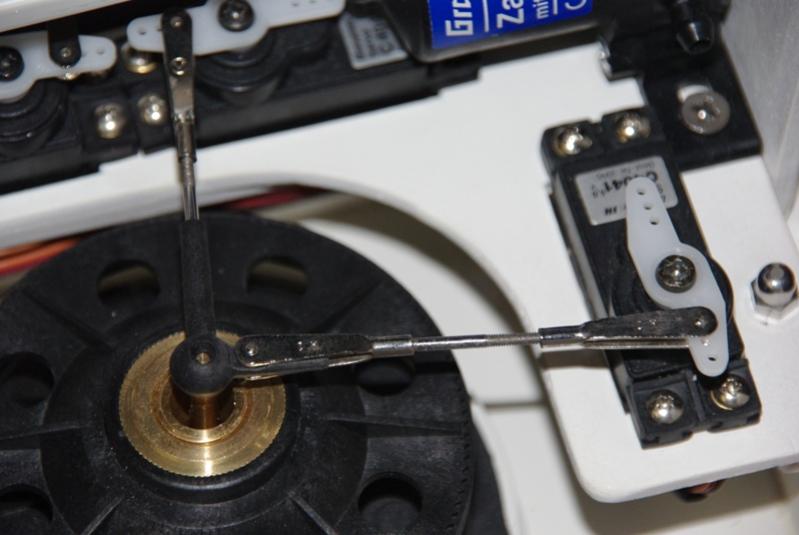
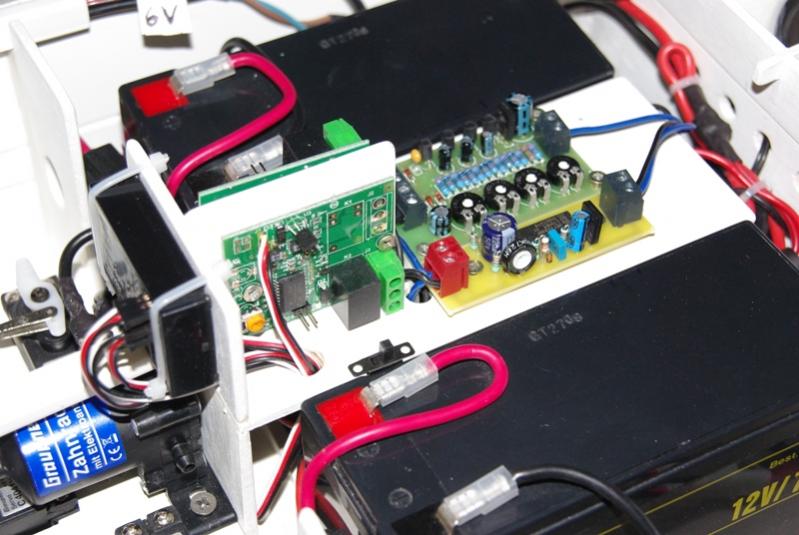
Baubericht Parat Nun möchte ich doch auch mal meinen Schlepper Parat von Graupner hier vorstellen, obwohl ich lieber weiterbasteln würde als hier am PC zu sitzen. Deshalb schreibe ich auch nicht so ausführlich, wenn Interesse an Details bestehen, bitte gezielt nachfragen, ich werde dann genauer darauf eingehen. Den Grundbausatz habe ich neu und originalverpackt mit Beschlagsatz und beiden VSPs äußerst günstig aus Österreich von privat erstanden. Als Erstlingswerk hatte ich jedoch Anfang Februar diesen Jahres noch keine genaue Vorstellung davon was da auf mich zukommt. Wie gesagt, der Grundbausatz war preiswert, dann kam jedoch 4 Wochen lang ständig alles Mögliche dazu, dass meist in der Bucht ersteigert wurde: Zuerst eine MC-12, ausgebaut mit Kanalmixern, zusätzlich erweitert mit Nautic-Splittmodul, - Empfänger und Slittdecoder um auch alle Funktionen steuern zu können, als da wären - Soundmodul, geschwindigkeitsabhängig gesteuert, No-Name Produkt, klingt aber gut - Nebelhorn von Robbe - 2 Robbe Switchmodule zur Ansteuerung der Soundelemente - Wasserpumpe mit Fahrtregler V-30 für stufenlose Drehzahlregulierung - Fahrtregler Graupner V-60 für die beiden VSPs - Relaisschaltungen für die Aus-und Ladeschaltungen für die beiden 12V/7A-Bleiakkus für Fahrtbetrieb und den 6V73A-Bleiakku für Empfänger und Sonderfunktionen - 4 Graupner 4041 Servos für VSPs und 3 Stck. für Löschmonitore - Vorbereitungen für zusätzliche Funktionen wie Beleuchtung - Graupner Ladegeräte für Sender und Bleiakkus - Kabel, Stecker, Sicherungen und unendlich viel Kleinkrams - Airbrushkompressor und Pistole - Kleber, Spachtel und so weiter… - Und nicht zuletzt ein paar Bücher Fachliteratur und einige Abende lang Studium im Schiffsmodellbauforum Nachdem ich dann so das meiste zusammen hatte konnte es losgehen. Zuerst habe ich die Anleitung durchgelesen und festgestellt das man darauf fast verzichten kann, der fantastische Bau-Blog von Lukas hat mir da schon sehr viel mehr geholfen ( wann geht es denn bei dir weiter ? ). Also zuerst die Löcher für die VSPs in den Rumpf geschnitten, mit Stechzirkel und Cuttermesser, anschließend Montage der Heckflosse. Dabei habe begonnen die Tiefziehteile lieben zu lernen… Die Montage des Schutzflügels unter den VSP war da schon interessanter, die Stützen habe ich im Rumpf und in der Unterplatte eingebohrt im Inneren mit einer Mutter verstärkt und mit Epoxydharz verklebt. Zusätzlich zu den bereits eingebauten werde ich noch weitere Stützen wie im Original dazufügen. Das Holzskelett im Rumpf habe ich stark verändert, da ich die beiden Fahrakkus weiter nach außen und tiefer montiert habe um dazwischen Platz für die Elektrik und Elektronik zu schaffen. Dazu habe ich eine Sperrholzplatte so ausgefräst das die Akkus rutschsicher in ihr stehen, aber herausnehmbar sind. Die Holzplatte zur Aufnahme der Platinen und Relais ist ebenfalls demontierbar und relativ wassergeschützt, falls doch mal Wasser eindringen sollte. Die Kabelbäume sind alle mit verpolungsicheren Steckverbindungen versehen und komplett demontierbar, da ja die gesamte Anlage bei der Lackierung entfernt werden soll und nach Montage des Decks wieder eingebaut werden muss. Die Gewichtsverteilung war dann allerdings beim ersten Probelauf in meinem Gartenteich nicht so toll, das Boot war hecklastig so das ich mich entschloss den Empfängerakku nach vorne zu verlegen, also noch mal die Montageplattformen und Kabelbäume ändern ! Die Belohnung dafür: Der Rumpf liegt jetzt exakt gerade im Wasser. Nennenswerte Probleme waren die Ansteuerung des Lautsprechers mit zwei Soundmodulen und Switchmodulen, die notwendig sind da die Module mit 12V laufen. Da ich nur einen Lautsprecher verwende, aber beide Module separat ansteuere und gleichzeitig betreiben möchte ohne das ein Modul weggeschaltet werden muss, dazu noch mit Lautstärkenregulierung für das Soundmodul, war hier schon eine kompliziertere Schaltung mit Leistungspoti notwendig. Dank einiger Ratschläge meins Elektronik-Shops hat aber auch das funktioniert. Die Funktionsprüfung war auch erfolgreich, es klappt alles, wenn auch mit einigen Anfangsschwierigkeiten, die jedoch dank des Forums meist gelöst werden konnten. Zu den VSPs: Die Originalansteuerung von Graupner ist eigentlich gar nicht funktionsfähig, da solche Verspannungen entstehen die nicht tolerierbar sind, also ändern! Die Lösungen die hier im Forum vorgestellt wurden haben mich noch nicht ganz überzeugt, da ich mich etwas gescheut habe ein Gewinde M2 in den Steuerkopf zu Bohren. Ich habe dann den einen Ausleger dicht am Kopf gekürzt und ein 2,5 mm Loch eingebohrt in das eine normale Servoanlenkung eingesteckt wurde. Funktioniert hervorragend. Die Servowegbegrenzung ist auf 35-40 % eingestellt und zusätzlich mit aufgelegten gefrästen Kunststoffscheiben mit 28 mm Innendurchmesser am Steuerknüppel der MC-12 begrenzt, da sonst bei vollem Vor-und Seitenschub bei Diagonalstellung des Knüppels die VSPs trotz Servowegbegrenzung schleifen und unangenehme Geräusche machen, so ist das aber ausgeschlossen. Da allerdings die VSPs nicht rechtwinkelig zur Mittelachse angetrieben werden zieht die Parat immer etwas nach rechts, so dass ein Kanalmischer mit 16 % Seitenschub nach links zugeschaltet werden kann. Zusätzlich habe ich zwei Kanalmischer für beide Servos für Vor-und Seitenschub programmiert, so dass ich die Parat leicht mit nur einem Steuerknüppel fahren kann. Das Fahrverhalten ist genial, vor allem die extreme Wendigkeit und die schlagartige Änderung von vorwärts auf rückwärts. Fortsetzung folgt.





-
hallo hier in anbau van mir eine antieb flugelkreis 120mm fur der neue schlepper SMITHBANK. der zweiten is auch soweit. m fr gr jan
-
Moin, moin, ich hätte da mal ne Frage zum Fahrverhalten eines Halbgleiters, was passiert eigentlich, wenn ein Halbgleiter ins Vollgleiten kommt, kippt er einfach zur Seite? Dieses Verhalten habe ich heute, bei der ersten Testfahrt mit neuem Antrieb und Ruder bemerkt. Bei vollgeladenen Akku und Vollgas kippt die Denker nach ca 5 m Geradeasufahrt nach Steuerbord. Wenn ich dagegen nur 3/4-4/5 Gas, fahre kippt das Schiff nicht. Sehe ich das richtig, dass ich die Denker ins "Vollgleiten" gebracht habe? Grüße Silver
-
Da Bauberichte so etwas wie das Salz in der (Forums) Suppe sind, habe ich mich entschlossen, nun doch einen Bericht zu erstellen. Ich hoffe Ihr findet etwas Interessantes und für mich fallen ein paar Tipps und Ratschläge ab. Kommentare könnt Ihr hier hinterlassen. Die Entscheidung einen Sumpfgleiter zu bauen ging von meinem Sohn aus. Was als nächstes gebaut wird durfte er entscheiden - einen Springer Tug wollte er nicht, ein Rennboot auch nicht, und auch keinen Schlepper. Beim gemeinsamen "Boote gucken" stießen wir ei YT aufb ein Airboat-Video. Nun denn ... Nach dem Studium verschiedener Bauberichte und weiteren Recherchen im Netz entstand in Freeship der Entwurf eines kleines Airboats ohne konkretes Vorbild. Die Übernahme des ungefähren Längen/Breitenverhältnisses erschien mir aber ratsam, denn ich habe keine Ahnung von derartigen Wasserfahrzeugen. Das Experiment kann also beginnen. Projektname: Muddy Waters Inspirationsquellen Airboat von davide auf rcairboats.net und Airboat von silver6ltr auf rcairboats.net Sumpfgleiter bei modellbau-sievers.de und Plan zum Download und fertig im In diesem Forum hier scheint es eine gewisse Airboat Fangemeinde zu geben. Man findet Bauberichte, Informationen und Diskussionen zur Abstimmung und Motorisierung. Entwurf und Rumpfbau Mein Freeship Entwurf Länge/Breite/Höhe: 41/24/2 cm Die Gesamtverdrängung bei einem Tiefgang von 2cm - also bis knapp unter die non-trip chines - habe ich überschlägig mit etwa 1500 Gramm berechnet. 0,41m x 0,24m x 0,02m = 0,001968 qm = 1,968 qdm = 1968 qcm Bei einem spezifischen Gewicht von 0,9982 kg/l bei 20 °C ergibt das 1964 Gramm. Wegen der nicht kubischen Rumpfform ziehe ich 'mal pauschal 25% ab. 1500 Gramm Gesamtgewicht sind also das Limit. Das sollte machbar sein. Die non-trip chines kamen durch meine 152VO Corsair in das Design. Sie werden hoffentlich die Kurvenlage positiv beeinflussen - sehen aber mindestens gut aus. Die genaue Konstruktion des Turms für die Motorbefestigung, die Ausführung der Seitenruder sowie des Drahtkorbes für den Propeller sind noch nicht entschieden. Das wird sich alles im Verlauf des Projektes ergeben. Der Rumpf wird in Spantbauweise ohne Helling entstehen. An Holz wird verwendet, was die Vorräte so hergeben - Pappelsperrholz für die Spanten, Kiefernleisten, Birkensperrholz zum Beplanken, Balsaholz.
-
Hallo Leute, wusste nicht ob ich lieber bei Antriebe oder lieber hier poste. Da ich mir etwas mehr weitgefächerte Antworten erhoffe, poste ich lieber hier. Ausgangsbasis: Robbe Diabolo, 820´er Motor, Direct Drive. Ziel: Kosteneffektiv flott, kein Wunsch mit dem Teil die Schallmauer zu durchbrechen Ich weiß, manche fahren das Teil mit 20 Zellen oder so, das muss für mich jetzt net sein. Allerdings sollte ich mich vor der Key West eines Freundes mit 700 Neodym und 12 Zellen nicht verstecken müssen! Frage: Was würdet Ihr für nen Regler und was für nen Prop empfehlen? Beim 820´er bleiben oder runter auf nen 700´er umrüsten? Die Welle ist bei der Diabolo ja fest eingeklebt - Ideen dazu um den Wellenwinkel (nötig?) zu verändern? Merci allseits! Pat
-
Baubericht eines Mini-Bootes mit Jetantrieb Moin Community, eigentlich bin ich ja kein Mitläufer, der jedem Trend hinter läuft. Doch ab und zu lasse ich mich von einigen Sachen überzeugen, wie dem SpringerTug- Virus, oder, wie in diesem Fall, dem Bereich der Mini-Modelle. Da ich bekennender Liebhaber von Katamaranen und Jetantrieben bin, viel mir die Wahl meines Mini-Projektes nicht schwer. Das gewählte Schiffs-Vorbild existiert momentan nur auf dem Reißbrett und verschafft mir so eine gewisse Freiheit beim späteren Bau. Gebaut wird im Maßstab 1:30, was später eine Schiffslänge von 26cm ergibt. Beginnen wird dieser Bericht mit dem Bau der beiden Jetantriebe. Wenn mir dies, gelingt, folgt der Bau des Katamarans. Da der kleinste Jet, den es auf dem Markt zu kaufen gibt, einen Durchmesser von 19mm hat, war von Anfang an klar, dass ich diesen selber bauen muss. Der Jet wird einen Durchmesser von 10mm haben und mit einer Steuereinheit nach KAMEWA ausgestattet sein. Des Weiteren werde ich erstmals Brushless-Motoren verwenden, da gerade die Outrunner im kleinen Format noch genügend Drehmoment für die Impeller haben. Los geht´s! Den Anfang machte ein einfaches Modell der Steuerdüse aus Pappe. Zum Einem, um die Funktionsweise zu verinnerlichen und zum Anderen, um Proportionen und die Maße zu kontrollieren und gegebenenfalls zu korrigieren. So erhoffte ich mir, spätere Überraschungen vermeiden zu können. Das Modell aus Pappe entstand im Maßstab 3:1, um den Bau etwas zu vereinfachen. Später wurden die Maße dann abgenommen und für den Bau der Einheit aus 0,3mm -Messing heruntergerechnet. Auf dem Bild sieht man die 1. Düsen mit Stator und die Steuereinheit (noch ohne Teile für den Umkehrschub) >> Kommentare
-
Hm... ich glaube fast, man kommt für diese Anwendung an der Microprozessor-technik kaum vorbei, völlig egal, welche Anlage im Einsatz ist. Um das mal weiterzuspinnen, meine Idee dazu: Im Sender: Inkremental-Drehgeber -> Positions- und Richtungsauswertung im Prozessor -> Erzeugung eines Analogsignals für den Kanaleingang mittels I2C-Poti. ob man dann über die Pulslängen am Empfänger eine digitale Positionsinformation überträgt oder die Pulslänge direkt auswertet, sei mal dahingestellt... letzteres stelle ich mir etwas einfacher und schneller vor. Am Empfänger: PPM-Impuls (1...2ms) -> Auswertung im Microprozessor -> Ansteuerung Drehantrieb mit Inkrementalgeber oder Schrittmotor. Grüße Torsten
-
Moin Zusammen Hier mal meine Skizze eines einziehbaren Schottel Ruder Propellers (SRP) denn ich für meine McCann entworfen habe. Bei diesem Entwurf wahr mein Hintergedanke die Technik so einfach wie möglich zu halten da die McCann später auch in raueren Gewässern eingesetzt werden soll. Der SRP sitz daher in einer wasserdichten Kammer wo er genauso verbaut ist als wenn er fest in einem Rumpf eingesetzt wird wobei zur 360° Ansteuerung sowohl die Steuerung von RC-Schottel oder Kagelmacher verwendet werden könnte als auch ein eigenbau. Das Heben und Senken der Antriebskammer kann entweder mittels einer Hubspindel oder über eine Winde geschehen, bei verwendung einer Hubspindel würde ich aber einen Riemen dazwischen setzen damit eventuelle Schläge auf dem Antrieb z.B. durch Grundkontakt nicht auf die Spindel übertragen werden. Sollte durch denn Motor entgegen meinen Erwartungen doch zu viel Wärme erzeugt werden so wäre noch genügend platz in der Antriebskammer um dort eine kleine Kühlwasserpumpe mit unterzubringen. Ich hoffe meine Ausführung ist soweit verständlich. Ghost
-
Hallo, ich sitze gerade beim Bau eines 26,5m Kutters mit einer 75er Schraube. Im Original läuft das gute Stück max 9 kn.Das Modell ist 105 cm lang, 28 cm breit. Was empfielt die Modellbaugemeinde für einen Motor; evtl einen Langsamläufer? Helft mir bitte. Habe schon überall gesucht. Viele grüße aus dem Schlaubetal Klausfünf
-
Hi, ich möchte die Wilhelmine bauen, bin aber noch Anfänger. Das Schiff soll ein Silofrachter werden. Den Bauplan habe ich ausgedruckt und die ersten Spanten sind auch schon ausgesägt. Wo ich noch große Schwierigkeiten habe, ist bei der Wahl des Antriebs. Bei anderen Sachen später sicherlich auch noch Ich habe natürlich hier ein wenig gelesen, aber mir fällt es nicht leicht die richtigen Komponenten auszuwählen. Propeller: Raboesch 30mm 4-Blatt Typ A Motor: Bühler BB 498 L, geht der? Wellenanlage: Was benutze ich da? Eine Kompakt Anlage von Raboesch oder doch lieber die wartungsfreie Wellenanlage? Dann nehme ich wohl am besten eine 12 V Stromversorgung. Da das Schiff geschlossen ist, kann ich ja eigentlich Bleiakkus verwenden und diese in den Laderaum packen, oder? Was fehlt mir noch zum Einbau der Antriebsanlage?
-
Moin ! Hab gerade auf der Graupner Seite unter Ersatzteile für Schottelantrieb 2 Einen Kegelradsatz Stahl gefunden. Hat die Teile schon mal jemand verbaut und wenn ja, bringen die Teile etwas ? Gruß Sven
-
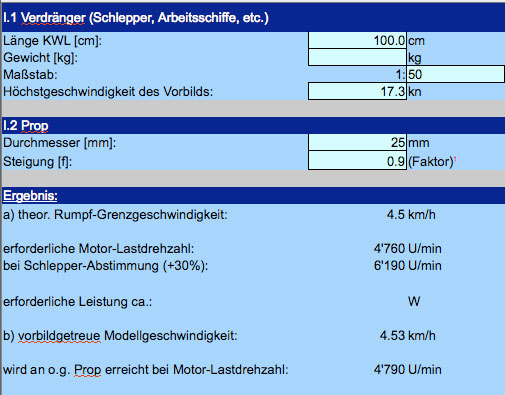
Bereits im «Vorwort und Plan-Download»-Thread habe ich die Frage gestellt und mache der Übersichtlichkeit halber hier einen eigenen Thread dafür auf. Wie wird ein «Wilhelmine»-Modell, das genau nach Plan gebaut ist, am besten motorisiert? Die Rumpfgeschwindigkeit (Vmax = Wurzel (KWL) * 4,5 km/h) liegt bei einer Rumpflänge von +/- 1 Meter bei etwa 4,5 km/h. Laut Plan sollte die Propgrösse etwa 25mm Durchmesser sein...ist er grösser, so dreht er unterhalb der Rumpfunterkante. Mit Jo_Ss «Motorcalc_V.12» sieht die Motorisierung so aus: Das heisst, dass der Motor mit rund 4800 U/min. drehen sollte, um mit einem 25mm-Raboesch-3/4-Blatt Typ A auf Rumpfgeschwindigkeit zu kommen (die haben eine Steigung von etwa 1, den Schlupf abgerechnet habe ich 0,9 angenommen...das ist so Standard, glaube ich...) Für diese Drehzahl fällt mir grad kein Langsamläufer ein, der auch von der Grösse her passen würde. Vielleicht müssen/dürfen wir hier auch mit einem Getriebe arbeiten... ...wie wärs mit einem Zahnriemengetriebe...? ...die Diskussion ist eröffnet...

-
Ich will die Schottel in meiner «Endless Summer» umbauen. Die Gründe dafür sind: Die Anlenkung mit Servos ist unzuverlässig, da wegen der Untersetzung sehr grosse Kräfte auftreten und deshalb immer wieder Servos durchbrennen. Der Antrieb über eine Welle mit Kegelzahnrad macht viele Laufgeräusche und kommt einem Umbau der Anlenkung in den Weg. Das Ziel ist eine ähnliche Lösung wie sie Jan in seiner Vikingbank gebaut hat. Für mich als Total-Laie auf mechanischem Gebiet stellen sich dabei fast nur Fragen, für deren Beantwortung ich sehr gerne Euer geballtes Wissen in Anspruch nehmen würde... Folgende zwei Bauteile gibt es also zu planen und bauen: der Antrieb mittels Zahnriemen die Anlenkung mittels Schneckengetriebe inkl. Positionsrückmeldung Für den Umbau habe ich meine Ideen in einer Skizze zusammengestellt: Dazu müssen die Grundplatten umgebaut werden. 1. Antrieb Motoren senkrecht in den Rumpf bauen, auf die Motorachse (6mm) und auf die Welle (5mm) je ein Zahnriemenrad befestigen und mittels Zahnriemen angetrieben. Für den Motor muss ich eine Halterung bauen, die es erlaubt, die Spannung des Zahnriemens zu verändern und fest zu stellen. Für mich stellen sich hier folgende Fragen: Wie wird so ein Zahnriemenrad auf einer Welle befestigt? Loch quer bohren - Gewinde hinein schneiden - Madenschraube? Was tun, wenn die Vorbohrung grösser ist als der Wellendurchmesser? Ich habe dieses mit 20 Zähnen für den Motor und dieses mit 60 Zähnen für die Schottelwelle ausgesucht (Übersetzung 3:1). Da der Zahnriemen an der Schottel- und an der Motorwelle «ziehen» werden: muss ich mir da eine Lagerung der Wellen überlegen, um einseitiger Abnutzung entgegen zu wirken? 2. Anlenkung Ein Schneckenrad wird auf die Anlenkachse befestigt, eine Hohlschnecke auf eine Welle befestigt und mit einer Halterung am richtigen Ort gehalten. Ein Elektromotor wird über eine Kupplung damit verbunden. Für mich stellen sich hier viele Fragen: Wie wird so ein Schneckenrad montiert? Da ist eine Nut drin, was eigentlich sehr gut und einfach wäre...aber ohne Falz auf der Welle...? Die Hohlschnecke wird wohl auf eine Stahlwelle montiert (Madenschraube?), welche dann präzise gelagert werden muss - mit einem Wellenbock und (welchem?) passenden Lager? Angetrieben wird die Welle mit der aufmontierten Hohlschnecke von einem Motor - die ganze Kombination rechnet sich wohl «rückwärts» von der gewünschten Drehgeschwindgkeit der Schottel. Ich möchte mich dabei möglichst an die Realität halten und die Schottel nicht allzu schnell drehen lassen. Jetzt brauchen sie für 180° rund 8 Sekunden. Kann mir jemand eine Kombination vorschlagen, die etwa solche Werte ergibt? Den Achsabstand habe ich noch nicht festgelegt, dazu muss ich zuerst den Umbau der Grundplatte planen... Wie entfremde ich einen (alten und ausgebrannten) Servo zweck für die Positions-Rückmeldung? Geht dafür jeder Servo - ich habe drei HS-5745MG von Hitech zum Verwenden... Hat jemand von Euch in solchen Dingen Erfahrung und kann mich beraten? Ich bin nicht in Eile mit diesem Umbau, sondern will mir zuerst einen Überblick verschaffen und dazulernen. Die genauen Masse muss ich noch nehmen.
-
Hallo allerseits, immer wieder hört man das irgendwer einen Schottel Pump Jet nachgebaut hat. Leider gibt es nirgendwo wirklich interessante Bauberichte deshalb versuche ich es an dieser Stelle. Die grundlegende Funktion ist ja, von der Rumpfunterseite Wasser anzusaugen,den Wasserstrom um 180 Grad umzulenken und dann durch annähernd horizontale Düsen wieder auszustoßen. Das Ganze muss so ausgeführt werden, dass es um 360 Grad drehbar ist. Nach intensivem Studium dessen was es im Internet so gibt, habe ich mir zunächst einige Skizzen angefertigt. Und aktuell bin ich dabei die einzelnen Teile zu fertigen. Keine Zeichnung gemacht habe ich für das Gehäuse, das ich ja in den Außenmaßen im wesentlichen an den Rumpf anpassen muss. Als Material für die meisten Teile dient mir ein dickes Stück Kunststoff, denke es ist klares Polycarbonat. Die Drehteile sind weitestgehend fertig und ich denke Bilder sagen mehr als 1000 Worte. Bilder Hier Hoffe in den nächsten Tagen komme ich noch dazu die Grundplatte aus 0,5 mm dickem Messing herzustellen. so das wars fürs Erste. Eure Kommentare und Verbesserungsvorschläge bitte hier hin
-
Hallo Ihr Schiffsverückten , langsam komme ich in die Phase wo ich mich für die Motoren entscheiden muss für meine 2m Fähre H/S/F Mariella Palace! Ich habe mal herumgefragt und man hat mir 2 Motoren empfohlen. Den Graupner Speed 900 BB Torque 12 V oder aber den IGARASHI SP3657-50 12V (Artikel-Nr.: 244478 ) bei Conrad Ich werde 2 Motoren in den Rumpf einbauen nur die frage welchen? Das Schiff wird nacher zwischen 17 und 20 Kg wiegen und ich brauche Motoren die das auch aushalten und das Schiff schön auf Fahrt bringen Ich hoffe das Ihr mir da weiter helfen könnt Danke euer Anek
-
Hallo! Bin neu hier. Mich interessiert wie ein Schottelantrieb funktioniert (im Detail) - konnte im Internet nichts finden, was den besagten Antrieb beschreibt - Ich kann es mir zwar ungefähr vorstellen, aber glaube, daß meine Vorstellung bestimmt irgendwo hakt... Ist er ein Patent, über das man nicht schreiben darf, oder ist er so "watscheneinfach"? Bitte klärt mich auf! Vielen Dank im Voraus! s17
-
Hallo. Beim Bau meiner Smit Denemarken in 1:75 hatte ich das Problem, dass es keine passenden Kortdüsen gab, also musste ich selber Hand anlegen. Ein weiteres Problem: ich brauchte 4 Kortdüsen. Leider verfüge ich auch nicht über eine Drehmaschine (irgendetwas ist ja immer ), also nahm ich mit Herrn Gramcko Kontakt auf und ließ mir eine Kortdüse als Rohling in der benötigten Größe drehen, welche dann abgeformt und mit den nötigen Anbauten versehen werden sollte. Als erster Arbeitgang musste ich mich um das Silikon kümmern. Der Markt bietet da einiges und in verschiedenen Preislagen. Wie immer darf sowas nicht viel kosten. Wichtige war aber, dass ich Silikon haben wollte, welches im Verhältnis 1:1 gemischt wird. Bestellt wurde: Silikon mit Härter (jeweils 500gr) Resin (Gießharz ebenfalls je 500gr) 2 Mischbecher 250ml Alupulver .