Search the Community
Showing results for tags 'antriebe'.
-

Kommentare zum Baubericht "DGzRS Zander"
MatthiasR posted a topic in Comments to Building reports: Ships
Hier ist die "Meckerecke" zum Baubericht... -
Hallo, ich habe mit meinem Zander (aus dem bekannten Graupner Hecht-Bausatz) vor ungefähr 1,5 Jahren begonnen, hatte aber bislang gezögert, einen Baubericht zu verfassen, da es doch nur relativ langsam voran ging. Das muß ich aber wohl jetzt doch mal nachholen, bevor ich meine Baubilder in diverse fremde Threads durch das ganze Forum verstreue Ich hatte mich schon relativ früh auf den Zander festgelegt (und auch gleich die Schilder dafür geätzt). Ein Besuch in Zingst und Wustrow kam erst etwas später. Dort habe ich allerdings nur den Barsch zu Gesicht bekommen (und mich dann auch nicht weiter bemüht, evtl. auch den Zander zu besichtigen; ich war bis dahin davon ausgegangen, daß die vier Boote doch weitgehend gleich wären). Auch wenn ich nach wie vor kaum Zander-Bilder habe (und inzwischen weiß, daß in den Details eine ganze Menge Unterschiede stecken), bin ich bei der Entscheidung für den Zander geblieben (nicht nur, weil die Schilder schon fertig waren). Da ist dann eben etwas "Mut zur Lücke" gefragt. Oder anders gesagt, etwas "künstlerische Freiheit" möglich Nachbilden möchte ich den Bauzustand von 2009 - also nach dem Umbau auf den Hamilton-Jet, mit den anderen Veränderungen, die es bei diesem Umbau gegeben hat. Speziell beim Jet sind da natürlich ein paar Kompromisse nötig - der Graupner-Jet sah schon dem PP-Jet nur entfernt ähnlich, nach Hamilton sieht er noch weniger aus. Ganz vorteilhaft ist in diesem Zusammenhang die bei dem Umbau verlängerte Heckplattform - die verdeckt recht gut die doch etwas voluminöse Umkehrhaube des Graupner-Jets. Schwerpunkt des Bauberichts sollen die Dinge sein, die ich etwas anders gemacht habe, als es von Graupner vorgesehen war. Und das ist eine ganze Menge... Da ich manchmal "im Eifer des Gefechts" vergessen habe, Bilder zu machen, werden die Photos wohl nicht immer genau in chronologischer Reihenfolge sein. Mal sehen, wie das klappt. Das soll nun aber genug der Vorrede sein - jetzt geht's los: Der Jet ist zusammen- und eingeklebt (mit Tangit http://www.schiffsmodell.net/showthread.php?t=34109 ) Unten habe ich den Jet-Ansaugkanal mit einer Art Rahmen aus Alu-Blech eingefaßt, in erster Linie, um Gewindelöcher zur Befestigung des Ansauggitters schneiden zu können. Zusätzlich bringt das natürlich auch noch Stabilität. Das Spantengerüst zur Motor- und Servobefestigung habe ich aus 3 mm-PVC-Platten gebaut. Zu den vorgesehenen Holzteilen hatte ich nur wenig Zutrauen (meine letzten Modellschiff-Erfahrungen sind zwar ungefähr 30 Jahre her, aber ich erinnere mich gut, das die Modelle damals immer innen etwas feucht im Kielbereich waren...). Die Schrauben für die Befestigung der Jet-Umkehrvorrichtung sind von innen eingeklebt (und damit absolut dicht), die Jet-Teile werden dann von außen mit (Modell-) Muttern befestigt. Die Durchführungsrohre für die Steuergestänge habe ich so lang gemacht, daß die Gummimanschetten unter einer (zu öffnenden) Luke im Deck landen, so daß man auch bei aufgeklebtem Deck noch herankommt. Befestigt sind die Gummimanschetten mit kleinen Schellen. Auf das Stevenrohr habe ich einen rechteckigen Flansch aufgelötet. Dieser ist mit zwei Schrauben an dem Lagerspant befestigt, dazwischen liegt eine Dichtung. Auf diese Weise bleibt das Stevenrohr ohne Flurschaden demontierbar, falls es nötig werden sollte, z.B. bessere Lager und/oder Wellendichtungen einzubauen. Die Epoxi-Platten mit den eingelassenen Alu-Klötzen haben etwas mit der Motorkühlung zu tun, dazu später mehr...(Das hier ist eins von den Bildern, die erst etwas später entstanden sind) Ich habe die äußeren beiden Längsstringer mit halbierten 6 mm-Alurohren verstärkt (genaugenommen etwas mehr als die Hälfte und halbrund ausgefräst, damit sie gut auf dem angeformten Profil sitzen. Einfach gerade halbieren hätte wohl auch funktioniert, man hätte dann aber mehr spachteln müssen) Die Aluprofile sind ca. 42 cm lang und laufen natürlich am vorderen Ende flach aus. Sie sind mit Acrylit angeklebt und zusätzlich mit jeweils drei Schräubchen von innen gesichert. Diese Verstärkung ist nicht nur vorbildgetreu, sie bringt auch noch Stabilität in den Rumpf. Und was noch viel wichtiger ist, sie verbessert den Geradeauslauf des Bootes (das war jedenfalls mein Eindruck bei den ersten Probefahrten: Fährt fast "wie auf Schienen". Um-die-Kurve-fahren geht aber trotzdem noch ) Zuerst hatte ich noch vorgesehen, bei Bedarf eine Platte mit angelöteten Finnen anzuschrauben. Das hat zwar nichts mit dem Vorbild zu tun, aber ich hatte von anderen Modellbauer gelesen, die so eine Maßnahme schon erfolgreich angewandt haben, um den ansonsten etwas nervösen Geradeauslauf des Modells bei höheren Geschwindigkeiten zu verbessern. Dazu war eine flache Ausfräsung (auf dem Bild erkennbar hinter dem Jet-Einlaß) vorgesehen. Inzwischen habe ich diese Ausfräsung aber wieder verschlossen - und die Probefahrt hat dann ja auch bestätigt, daß die Finnen nicht nötig sind. Die verstärkten Längsstringer machten es notwendig, die Bügel am Heck neu anzufertigen, da diese ja nun etwas tiefer angesetzt werden mußten. Die Neuanfertigung (als Kunststoffplatten-Sandwich) war aber wohl kaum aufwendiger, als die graupnerschen Halbschalenteile sauber auszuschneiden und zusammenzukleben. Die mittlere Lage ragt bis in das Rumpfinnere (s. erstes Bild). Das Ansauggitter ist aus Messingteilen zusammengelötet. Die Stäbe haben einen (strömungsgünstigen!) ovalen Querschnitt, sie sind aus Flachmaterial 3x1 hergestellt. Die Zwischenräume sind 2,5 mm breit. Das Gitter wird mit vier Senkschrauben M2 befestigt und kann jederzeit zum Reinigen entfernt werden. Hier noch ein Bild des Gitters vor dem Schwärzen: [ATTACH]2732[/ATTACH] Grüße Matthias


-
Hallo ich habe jetzt die "Geeste" angefangen, obwohl ich noch keine Fotos habe. Bilder vom Spantgerüst, beklebt und der ausgeformte Rumpf. Ist noch viel Schleifarbeit. Viele Grüße Gabi Kommentare bitte hier: http://www.schiffsmodell.net/topic/13388-kommentare-rotortug-rt80-28-geeste/#entry178065


-
:lol: Für zwischendurch, weil ich auf Teile für das Freifallrettungsboot warte und weil ich da „drüber gestolpert“ bin: Mal ein anderes Rettungsboot – ein RNLI Hovercraft! Über was schreibe ich hier? Im Web findet man dazu jede Menge Bilder https://www.google.de/search?q=rnli+hovercraft&biw=1920&bih=945&tbm=isch&tbo=u&source=univ&sa=X&sqi=2&ved=0ahUKEwiD65f8gf3LAhVDSRoKHdw2A5EQsAQILA Gibt auch noch verschiedene Typen... Und: es gibt einen Kit in UK: http://shop.modelhovercraft.co.uk/index.php?route=product/product&path=59&product_id=75 Ist auch vom Preis vertretbar IMHV. Also mal bestellt und wurde auch prompt geliefert!!! Thanx Jag if you read here!! Das Modell kann was, schaut mal da rein: https://www.youtube.com/watch?v=CtqEdWV6UJQ https://www.youtube.com/watch?v=D7OfT9IQwtY Und hier meine Baustelle: Der Kit wie er so ankommt (!!! der Kleber ist auch mit drin ). Der wesentliche Baustoff ist Depron, kennen wir von den Aeronaut Modellen als Helling. Grösstes Projekt bis dato: Baue die Klebehilfe für den Windkanal/Propeller Ist schön beschrieben in der Anleitung Und dann gemacht: besteht aus Depron und Balsaholz Wässern des Balsa und wird mit Holzleim eingestrichen, dann verklebt und geformt Übrigens ist die Anleitung sehr gut, ist auf Englsich, was zumindest mir keine Probleme bereitet, aber auch die Abbildungen sind quasi selbsterklärend. Gut gemacht – Well done! Dann kam die Wanne dran: Zusammengesteckt und dann verklebt (wie gesagt: der Kleber liegt bei, also keine grosse Überlegung welchen man nimmt) Soweit simmer........ Gruss Chris Kommentare etc sind wie üblich gerne gesehen und helfen weiter! Hier! http://www.schiffsmodell.net/index.php?/topic/14798-kommentare-zu-rnli-hovercraft/
-
Hallo, hier könnt ihr euch zur dem Bericht zur Wulf 7 auslassen..
-
Hallo Schiffsmodellbau-Freunde Ich mache seit dem Sommer 2015 wieder Aktiv Schiffsmodellbau, und habe da einige Fragen Wenn ich darf stelle ich diese jetzt einfach mal und schaue ob jemand Antworten darauf hat (?) 1. Welche Motoren würdet ihr empfehlen? Stromsparend, Leistungsstark, nicht zu schwer? 2. Was Licht angeht bin ich absoluter Neuling. Würde meine Bermpohl aber gerne Beleuchten egal ob per hand am Schiff ein schalter oder Per Funke Wie mache ich das am besten und wie bzw was würdet ihr so empfehlen? Also z.B. Mast beleuchtung oder Suchscheinwerfer, Arbeitsscheinwerfer etc. 3. Kennt ihr eine gute Seite wo es Teile für den Führerstand gibt? Meine Bermpohl ist nämlich auf die Art der Frühen Version also mit offenem Führerstand und will da bisschen Details bringen 4. Was sollte ich machen 2 Regler oder? und ist 12V 7Ah Bleiakku empfehlenswert? 5. Als Funke habe ich eine Robbe Promars mit Ausbaumodulen aber die hat irgendwo einen Wackelkontakt also Spannungsabfall ab und an und dann noch eine Robbe Terra Top ohne Ausbaumodulen. Kann mir jemand sagen wo bzw wie ich raus finden kann wo der Wackelkontakt ist und ob die Funken zu gebrauchen sind? Danke schon mal im voraus und ich hoffe das ich nicht all zu sehr Nerve mit den vlt. blöden Anfänger Fragen MfG Marc G Falls ihr Bilder Benötigt sagt bescheid
-
Wie die Jungfrau zum Kinde und so weiter...so oder so ähnlich beginnen hier wohl oft Bauberichte und passiert sehr viel im Leben-nicht nur eines Modellbauers...Bei mir war es die Seabex One von Graupner, als ein Forenmitglied seinen Dachstuhl meinte aufräumen zu wollen-hatte er jedenfalls behauptet...In Wirklichkeit glaube -oder weiss ich sogar-hat er nur Raum geschaffen für eine weitere SeabexOne-aber das ist ein anderes Thema...Darüber will ich hier auch nur am Rande berichten....Hauptsache es ist wieder was neues zum friemeln da.und darum soll es hier gehen,aber seht selbst.Einige Fotos vom Auslieferungszustand!





-
Hallo, auf der Messe in Friedrichshafen konnten wir bei dem Gespräch am Multiplex-Stand erfahren, dass es seitens der Firma den Wunsch gibt, das Außenläufer-Programm besonders für Schiffsmodellbauzwecke zu erweitern. Allerdings waren unsere Gesprächspartner da ein wenig in Verlegenheit, was denn gewünscht würde. Ich denke, so eine Steilvorlage sollten wir uns nicht entgehen lassen und unsere Wünsche zumindest artikulieren. Was dann davon umgesetzt wird, ist natürlich die Entscheidung von Multiplex und muss auch wirtschaftlich einen Sinn ergeben. In der weiteren Diskussion im Messeteam kamen dann schon ein paar Wünsche zum Vorschein: Luftkühlung entweder schon vorhanden oder nachrüstbar Wasserkühlung hielten wir für verzichtbar, weil sie 1. nicht an den Stellen kühlen kann, auf die es ankommt und 2. ein richtig ausgelegter Antrieb auch nicht übermäßig warm werden sollte Wechselbare Welle mit Durchmesser von 1/8" (3,18 mm), damit's zu kleineren Bürstenmotoren passt. Drehzahl von 300 bis 1200 U/V Die Liste war noch deutlich länger, aber wir waren so auf neue Motoren fokussiert, dass wir natürlich vergessen haben, das gleich aufzuschreiben Das ist aber auch nicht schlimm, denn schließlich wollen wir nicht die Meinung Einiger, sondern möglichst Vieler wiedergeben. Daher bitte ich, weitere Ausstattungsdetail hier nachfolgend mitzuteilen.
- 24 replies
-
- 1
-

-
- elektromotor
- antriebe
- (and 1 more)
-

Hat jemand schon mal ein Bugstrahlruder selber gebaut?
derManfred posted a topic in Propeller und Wellen
Hallo Ich möchte mir das Bugstrahlruder für meine STABERHUK selber bauen. Eine Drehmaschine sowie eine Fräsmaschine sind vorhanden. Das Ganze sollte auch wartungsfreundlich und zugänglich sein. Kann mir jemand ein paar Tips geben? Es gibt ja die verschiedensten Ausführungen. - Mit einem Propeller - Mit zwei Propellern - Mit einem mehrteiligen Flügelrad - Mit einem zweiteiligen Flügelrad - Mit einer Pumpe und Schläuchen - ..... Viele Grüße Manfred -
Hallo, ich habe mein MiamiCrashboat von einem 400er MPX Permax auf einen brushlessOutrunner über die Winterpause umgebaut. Folgendes Setup: 2S Lipo Motor: Pichler Boost 10 , C2093 1400kV Regler Graupner BVR 20 Prop.: 30er 2 Blatt Rennprop. Graupner, kommt aber beim nächsten mal kommt ein größerer zum Testen dran, da ich mit der Endgeschwindigkeit noch nicht glücklich bin (max 15 km/h ) Bootsgewicht ca. 1 kg Nun mein Problem: Beil Teillast schwankt die Drehzahl bei konstanter Knüppelstellung um ca. 2000 min-1. Nicht nur bei einer bestimmten Tellaststellung sondern bei verschiedenen. Da ich zum ersten Mal brushless einsetze suche ich Tips. Vollast ist kein Problem da läuft der Motor konstant. Hier ein Bild vom Boot.

-
Hallo, ich habe folgendes Problem. Ich hab Grad ein Motor aus einer alten Festplatte ausgebaut aber bekomme ihn nicht zum Laufen dummerweise hat er nicht wie jeder andere Motor 2 oder 3 Anschlűse sondern 4 ??? Der Motor hat hinten eine Aufschrift aber hab nichts dazu im Netz gefunden. ich hab mal irgendwo Kabel dran gehoben aber er nur gezuckt. bitte helft mir. Lg flying jani
-
Moin Freunde des Modellbaus! Hier mein neuestes Projekt: Ich habe for, bei meinem Springer Tug ein Beckerruder nebst Kortdüse zu bauen. Beckerruder sind normale Ruder, welche ein kleineres Segment durch eine Mimik noch weiter ausschlagen lassen. Damit wird eine noch höhere Wendikeit und ein kleinerer Wendekreis erreicht. Das möchte ich auch im Modell haben! Also werde ich hier den Bau dokumentieren! So soll es dann mal aussehen: von der Seite und von oben (Beckerruder von Whisper an seinem Springer Tug) Mal sehen ob es gelingt. Die Planung läuft , der Bau beginnt, wenn ich den Rumpf des Springer mit Welle und Kortdüse ausgestattet habe, weil erst dann die genauen Maße fest stehen! Bis dahin könnt ihr eure Meinung, Tipps oder eure Beckerruder zeigen und erklären, dann hat jeder was davon!
-
Hallole, Das hab ich grad gefunden http://www.ladeas.no/video.html Konzept zum Frachtschiffbau, und Antrieb durch Wind Vielleicht nicht das Schönste Schiff, aber das Konzept ist interessant. Grüße Chris
-
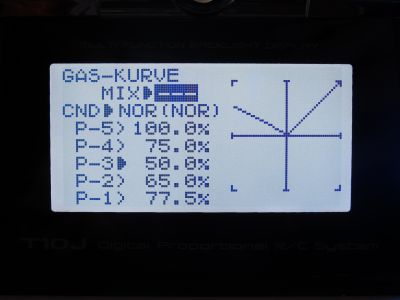
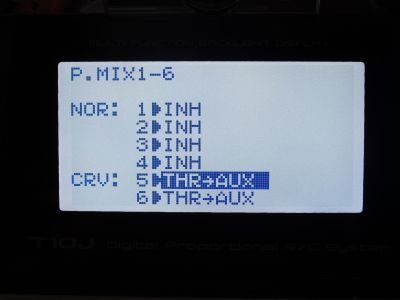
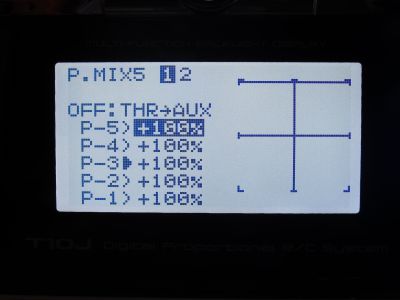
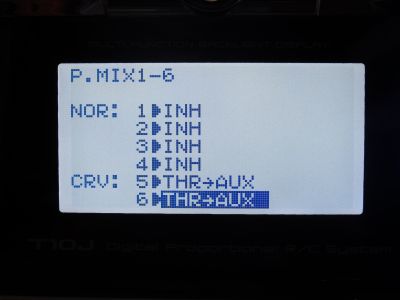
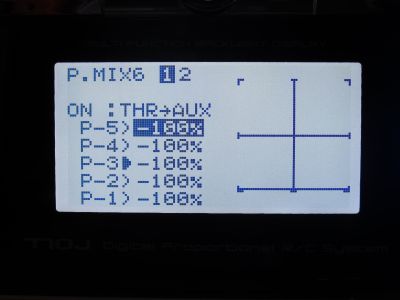
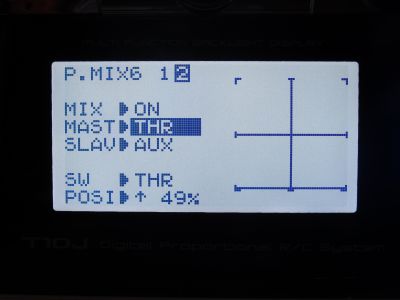
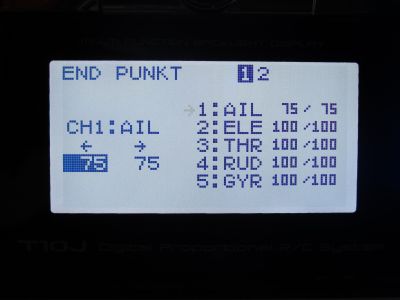
Hallo Zusammen, hier eine kleine Programmieranleitung wie ich meine Futaba T10J programmiert habe, damit die Umkehrklappe (Servo auf Kanal 8) nach unten fährt, sobald ich den linken Fernsteuerungsknüppel (Kanal 3) aus der federzentrierten Mittenposition (50%) nach hinten ziehe. Der Fahrtregler (Kanal 3) bekommt immer noch ein Vorwärtsfahrsignal, allerdings mit Reduktion der Maximalgeschwindigkeit. (Rückwärts ist ja eh nicht so effektiv beim Jet und damit nicht noch die Umkehrklappe "weggeblasen" wird, wenn man eine Notbremsung macht). Die Lenkung, also das Schwenken der Düse liegt auf dem linken Knüppel (Kanal 1) Die Anleitung mag in abgeänderter Form sicher auch für andere progammierbare Fernsteuerungen gelten. Bei meinem Vorgängermodell, einer analogen F14 hab ich noch mit einem Mikroschälterchen und zwei Potis in der Fernsteuerung gearbeitet, zudem musste ich beim Fahrtregler noch zum Lötkolben greifen um zu verhindern, dass der die Drehrichtung ändert, ja das waren noch Zeiten! Also die T10J ist ja eigentlich für Flugmodelle ausgelegt (Heli, Acro, Quadrokopter). Wir lassen sie im Helikopter-Modus. Anpassung der Gaskurve: Was machen: über die Punkte P-1 bis P-5 kann eingestellt werden welches Singal an Kanal 3 für den Fahrtregler anliegt. Gemäss den obigen Einstellungen ist die Geschwindigkeit bei Vorwärtsfahrt Linear und beträgt 100% wenn der Knüppel nach vorne "auf dem Tisch" liegt. Bei "Rückwärtsfahrt" haben wir ebenfalls eine einigermassen Lineare Geschwindigkeitskurve, erreichen aber nur 77.5% der Maximaldrehzahl des Motors. Da alle Punkte positiv sind, dreht der Motor auch bei "Rückwärtsfahrt" in der selben Richtung wie bei "Vorwärtsfahrt". (Falls die Drehrichtung für den Fahrtregler nicht passt, kann im Menüpunkt "Umpolung" das Signal invertiert werden) Nun zur Ansteuerung des Servos für die Umkehrklappe (bei mir auf Kanal 8). Ich "missbrauche" dazu die zwei frei programmierbaren Mischer 5 & 6 und will den Servo entweder zu 100% in die eine Richtung oder zu 100% in die andere Richtung ausschlagen lassen. Die Wegbegrenzung erfolgt später im Menüpunkt "Endpunkt". Auswahl Mixer 5: Was machen: Mixer 5 anwählen Einstellungen Mixer 5, Ebene1: Was machen: Wir stellen bei allen Kurvenpunkten P-1 bis P-5: +100% ein Einstellungen Mixer 5, Ebene 2: Was machen: Wir wählen aus, dass der Mixer als "Master" Kanal 3 (THR: Throttle beim Helikopter, also der Gashebel) nimmt und diesen auf "SLAVE" Kanal 8 "AUX" wirken lässt. "AUX", etwas unschön, bei der T10J heissen alle Kanäle 7 - 10 "AUX" und man muss durch durchzählen Kanal 8 auswählen: Kanäle: 1 - 2 - 3 - 4 - 5 - 6 - 7- 8 - 9 - 10 Kurzbezeichnungen: AIL - ELE - THR - RUD - GYR - PIT - AUX - AUX - AUX - AUX Vielleicht lassen sich die Bezeichnungen in einem anderen Menü abändern, muss ich mal noch untersuchen. Hinter MIX steht noch OFF, das ändert sich auf ON, sobald wir unter SW "Switch" (also die Schaltbedingung) THR "Throttle" (Kanal 3, linker Knüppel) diesen einen Hauch (von 50% auf 49%) nach hintern gezogen haben. Der kleine Pfleil nach unten hinter "POSI" lässt sich mit den "+" und "-" Tasten rechts vom Display umkehren und durch drücken des Joy-Stick-Knopfes wenn wir den Knüppel ganz leicht nach unten aus der Neutralposition gezogen haben (49%) sagen wir dem Mixer, dass er ab dann aktiv sein soll. Das schöne dabei ist, die Anzeige ändert sich live wie man am Knüppel fummelt Ausserdem empfiehlt es sich, zumindest den Umkehrsevo schon mal auf Kanal 8 anzustecken, allerdings noch ohne ihn Mechanisch mit der Klappe zu verbinden, damit er nichts abdrückt wenn er dann voll und eventuell zuerst auch noch in die falsche Richtung ausschlägt Nun kommt das selbe noch für Mixer 6. Mixer 6 auswählen: Mixer 6, Ebene 1: Was machen: Alle Punkte auf -100% einstellen Mixer 6 Ebene 2: Was machen: Wiederum Master ist Kanal 3 "THR" (Throttle, Gasknüppel), Slave "SLAV" ist wieder "AUX" (Kanal 8), als Schaltbedingung "SW" (Switch) wird wiederum der Gasknüppel beigezogen, diesmal allerdings sobald er bei 49% oder grösser (kleiner Pfeil zeigt nach oben) steht. Hier steht jetzt auch hinter "MIX" -> "ON" weil sich der Knüppel bei der Aufnahme in der Mittenposition auf 50% befand. Falls der Servo in die Falsche Richtung ausschlägt, kann man entweder die + / - 100% in den beiden Mischern vertauschen oder die Servo-Polariät im Entsprechnenden Menü Nun passen wir noch die Endpunkte des Umsteuerservos und des Lenkservos an, damit die uns nicht die Anlenkung verbiegen oder gar beschädigen und sich unnötig auf Druck einen abackern und zuviel Strom verbraten. Menü End Punkt Ebene 1: Was machen: Unter Kanal 1 "AIL" begrenzen wir den Lenkservo (bei mir je 75%) Menü End Punkt Ebene 2: Was machen: Unter Kanal 8: AUX begrenzen wir den Umkehrservo (bei mir auf 34% bzw. 49%) Tipp: Hier vor dem Einbau des Servos ganz kleine Werte (10%) eintragen und dann in eingebautem und voll angesteuerten Zustand mit den "+" "-" Tasten die Werte soweit wie nötig erhöhen". Ja, das wärs dann soweit mal in groben Zügen Ich hoffe es war einigermassen Verständlich und dem einen oder anderen als Ideenspender hilfreich. Mit diesen Einstellungen lässt sich der Jet-Antrieb fast wie ein konventioneller Schiffsantrieb fahren. Auch Notbremsungen funktionieren erstaunlich gut gamit. Ich verwende SBUS Servos und hab diese noch etwas getuned, damit sie auch schön schnell reagieren, aber das ist optional. Wer auf eine separat angesteuerte Umkehrklappe schwört, der ignoriert meinen Beitrag hier ganz einfach Grüsse Jetmaster


-
Hallo zusammen, wie ich im Forum gesehen habe (http://www.schiffsmodell.net/topic/3251-schutzgitter-am-einlass/), wurde bereits schon diskutiert, ob man beim Jet Antrieb überhaupt und wenn ja was für einen Schutz anbringen kann, soll oder muss. Ich möchte hier meine Erfahrungen einbringen, entscheiden muss natürlich jeder für sich, aber vielleicht gibt euch mein Vorgehen neue Anregungen. Ich hab mir vor vielen Jahren einen Graupner Hecht aufgebaut, weil mich der Jet-Antrieb fasziniert hat. Ein Schutzgitter hatte ich nie angebracht, weil ich immer der Meinung war: Was da rein kommt, soll der Jet häckseln und hinten als Brei wieder ausstossen! Tja, das tat er aber eigentlich nie, ständig musste ich anlanden, und mit Hilfsmitteln Blätter und Seegräser entfernen. OK, ich fahre das Ding Hauptsächlich auf dem Rhein in der Schweiz bei Schaffhausen. Wer natürlich nur in sauberen Gewässern oder im Schwimmbad fährt, der braucht wirklich keinen Schutz. Der Tipp in der Grauper Bauanleitung Rundstäbe aus Messing hässlich mit Stabilit Express vor den Einlass zu kleben, wie es auch Gerhard O.W. Fischer in seinem ansonsten vorzüglichen Buch "Schiffsmodelle mit Jet-Antrieb" beschreibt, hat mich nie wirklich überzeugt. Bei einem Streifzug durch den Baumarkt bin ich dann auf ein Rautenmaschen-Gitter (R10-5-KF-A-10) mit 10mm x 5mm Rauten gestossen, welches ich mal in den Jetansaugkanal eingeklebt habe. Logischerweise hatte ich von da an kein Problem mehr mit angesaugten Blättern und Seegräsern :-) Ich hab mittlerweile zwei weitere Boote mit den 28mm Jets von Kehrer aufgebaut, die bekamen gleich auch so ein Schutzgitter verpasst. Was ich mal noch (im Sommer, wenn man ohne Erfrierungsgefahr zum Modellboot ins Wasser steigen kann :-) untersuchen muss, ist ob es Kavitätseffekte am Gitter gibt. Speziell wenn man den Kehrer Jet mit bis zu 20'000 U/min laufen lässt, möchte ich das nicht ausschliessen. Wer also auf top-speed aus ist, für den ist meine Lösung eventuell nicht optimal. Wer aber nicht so sehr auf top-speed dafür für Fahrvergnügen und unterbrechungsfreie Fahrt bis der Akku zur neige geht was übrig hat, der kann sich ja auch mal so ein Rautenblech in den Ansaugtunnell kleben. Das Problem, dass ich etwas dermassen am Gitter festsaugt und nicht mehr abfällt kann ich nicht bestätigen. Allerdings muss man bei "zugesaugtem" Gitter kurz den Antrieb komplett zum Stillstand bringen, dann löst sich der angesaugte Gegenstand vom Gitter. Bemerken dass was drunter hängt tut man, indem man merkt, dass der Topspeed einbricht und sich der Klang des Jets verändert, auch der Strahl ist nicht mehr richtig satt, mit mehr "Luft" drin. Ich hab dazu mal meine Action-Cam am Rumpf unter Wasser montiert und gefilmt was da so abgeht wenn man durch Blätter fährt ;-) Das Video findet ihr hier: https://www.youtube.com/watch?v=4JEO2bBCTWc In diesem Sinne: immer zwei Finger breit Wasser unter dem Ansaugkanal! jetmaster2000
-
3 downloads
Es wird der ESC Kanal vom Empfänger ausgewertet. Bei Vorwärtsfahrt wird der Servo an einen Anschlag gefahren, bei Rückwärtsfahrt wird der Servo automatisch an den anderen Anschlag gefahren und das Motorensignal als Vorwärtssignal ausgegeben. Dazu sind noch folgende Features wichtig: Der Servokanal muss reversible sein, und man muss den Weg einstellen können, am besten man kann die beiden Position direkt per Fernbedienung programmieren. Auch der Motorkanal sollte einstellbar sein, damit man z.B. auch günstigere Flugregler verwenden kann. Der Empfänger wird vom Pin 2 gelesen, die Ausgänge liegen auf Pin 9 (Klappenservo) und 10 (ESC). Am Anschluss 5 wird ein Taster (PRG) gegen Masse angeschlossen. Im Programm gibt es einen Programmiermodus, wenn der Taster PRG beim Einschalten gedrückt wird. Dann können die beiden Positionen des Klappenservos und die minimale und maximale Ansteuerung des ESC's gespeichert werden. Zunächst muss die obere Position gespeichert werden, dazu die Steuerung auf den gewünschten Wert einstellen und PRG drücken. Zur Quittierung blinkt die Board-LED. Danach wird die untere Position angefahren und genauso gespeichert. Jetzt die maximale Stellung des ESC, und danach die Minimalposition. Der Programmiermodus wird dann automatisch verlassen. Die Werte für die Klappe und den ESC werden im EEPROM abgelegt und beim erneuten Start auch wieder gelesen. Die minimale Position steht im EEPROM in der Adresse 0, die maximale Position an Adresse 1. (Es ist dabei völlig egal, welchen Wert die untere bzw. obere Position tatsächlich haben. Unten definiert nur den Rückwärtsbetrieb. Wie der Servo dabei stehen muss, ist völlig egal. Es wird beim Speichern einfach die programmierte Position angefahren. Das gleiche gilt auch für die andere Position.) Adresse 3 enthält den ESC Max Wert und 2 den ESC Min Wert. Weiterhin kann im Programm auch der ESC bei Rückwärtsfahrt auf halbe Leistung geschaltet werden. Dazu dient der Compilerschalter HALF_BACK_THROTTLE. Ich hab das ganze auf einer Lochrasterplatine mit Mega328 aufgebaut. Das Programm kann aber auch auf einem Tiny85 laufen. Zum Beitrag im Forum -
Moin liebe Freunde der Outboard Racer! Unser User Schlossherr ist in den unendlichen Weiten des Internets über eine erstaunliche Seite gestolpert: Historische Modell-Außenborder - zum Teil nach dem 2ten Weltkrieg produziert! Einfach mal stöbern und sich Anregungen für den eigenen AB holen und im Modell umsetzen... Viel Spaß beim stöbern... Und wer noch ein paar alte Originale in 1:1 sich angucken möchte: Hier lang...
-

MC32 - VSP Steuerung mit Antriebsregelung
Ümminger Kapitän posted a topic in Sender, Empfänger, Module
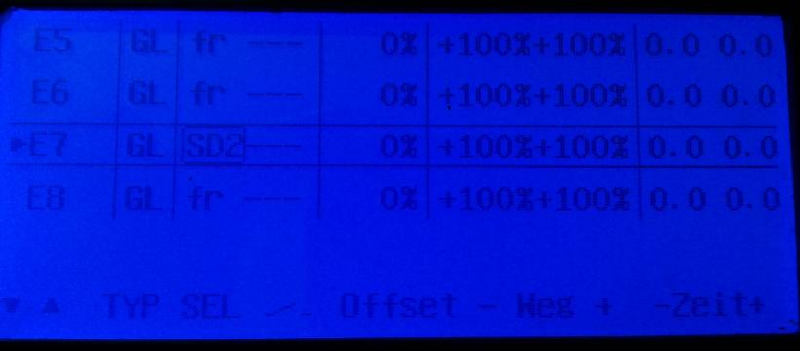
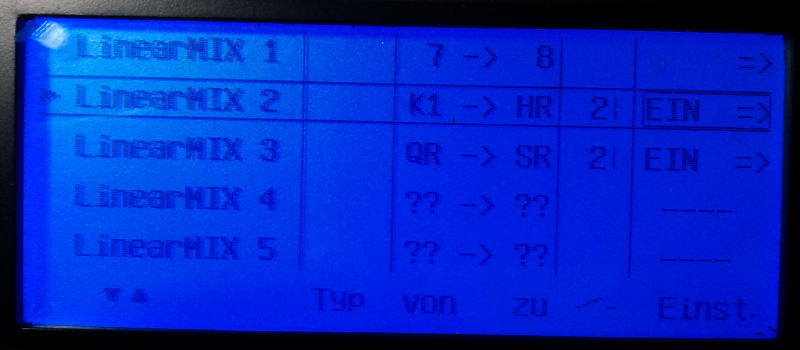
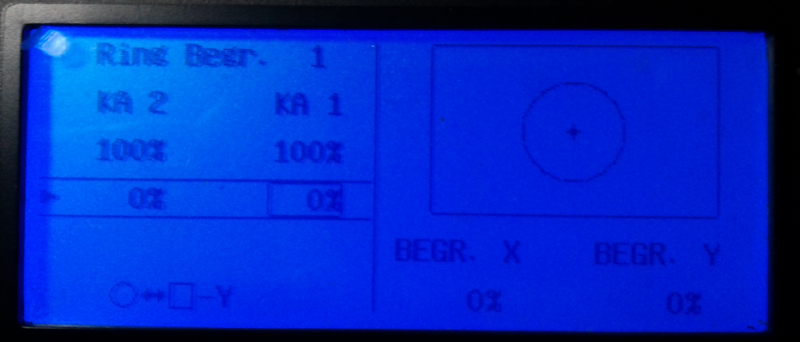
Dann werde ich diesen interessanten neuen Bereich mal eröffnen. In meinem ersten Beispiel möchte ich die Ansteuerung zweier Voith Schneider Antriebe(VSP) Die Antriebe wird können über Linear Mischer auf einen Knüppel gelegt um für die Marschfahrt parallel gesteuert werden. Zum Manövrieren lassen sich die Antriebe trennen und das Modell wird mit zwei Knüppeln manövriert. Die Antriebsdrehzahl für beide Maschinen wird über den seitlichen Hebel (SD2) geregelt. Einstellungen: Grundeinstellung Modell: Steueranordnung 4 Grundsätzlich ist das egal, für die erfolgreiche Nachprogrammierung aber erforderlich. Gebereinstellung: E7 | GL | SD2 --- | 0% | + 100% - 100% | 0.0 0.0 Freie Mischer: LinearMIX1 | | 7 -> 8 | | => | Mixanteil ASY +100% - 100%, Offset 0% LinearMIX2 | | K1 -> HR | 2l | EIN => | Mixanteil ASY +100% - 100%, Offset 0% LinearMIX3 | | QR -> SR | 2l | EIN => | Mixanteil ASY +100% - 100%, Offset 0% Ringegrenzer: 2 1 2 1 EIN | Ringbegr. 1 KA2 100% / 0% KA1 100% / 0% 4 3 4 3 EIN | Ringbegr. 2 KA2 100% / 0% KA1 100% / 0% Empfängerbelegung: Belegung GR24: Steckplatz 1 = Steuerservo Voraus li Steckplatz 2 = Steuerservo Seite li Steckplatz 3 = Steuerservo Voraus re Steckplatz 4 = Steuerservo Seite re Steckplatz 7 = Drehzahlsteller li Steckplatz 8 = Drehzahlsteller re Kommentare und Anregungen, gerne. Weitere Sender wo ihr das erfolgreich einsetzt, für ich gerne hinzu. Bitte daran denken, dies kann nur eine Grundeinstellung sein, die Feinjustierung insbesondere der Servowege und der Begrenzer sind von eurem Modell abhängig.


-
Ahoi und einen schönen Sonntag Nach vielen Diskussionen hier im Forum, bei welchen ich mich auch beteiligt habe, ist immer wieder das Problem des Drehens von "Unendlich x 360 Grad" angesprochen worden. Wie Ihr alle wisst, bin ich daran geblieben und genau deshalb ist es etwas stiller geworden. Die Idee einer Realisierung war da, hatte aber mit einigen Tücken zu kämpfen. Dank meinem lieben Freund Hans, ja auch Hans, haben wir aus der Idee ein gemeinsames Projekt generiert. Hans habe ich in einem CNC-Forum kennengelernt und er hat mir damals die geniale Atmel-Leuchturm-Steuerung gebaut. Beim Projekt-Beginn haben wir viele Parameter besprochen und ein Konzept ausgearbeitet, da Hans und ich in verschiedenen Ländern wohnen. Die heutigen Kommunikations-Wege lassen so ein Projekt auch über Entfernungen entstehen. Die vielen Zeichnungen, Pläne, Skizzen, Schemata und Print-Layouts haben wir über einen gemeinsamen FTP-Server verwaltet und damit sichergestellt, dass wir gegenseitig immer Up-to-Date waren. Und da waren seit dem Projekt-Start Mitte April noch 227 E-Mail’s, rund 50 MB Daten-Volumen, welche zwischen Deutschland und der Schweiz vermittelt worden sind. Folgende Voraussetzungen waren uns wichtig: Umbau Sender: Kreuzknüppel ausbauen, Schottel-Geber einbauen, d.h. keine Eingriffe in die Elektronik des Senders Auf der Empfänger-Seite wird das normale Servo durch die Schottel-Steuerung ersetzt, auch hier keine Eingriffe in Empfänger und im Signal-Weg Einbau und Einstellungen für jeden Anwender einfach und transparent, eingestellte Parameter werden dauerhaft im Schottel-Antrieb auf dem Chip gespeichert Schottel-Verhalten wie im Original, also kein Super-Speed-Servo, sondern die reale Abbildung eines Schottels, mit all seinen Mängeln (z.B. Laufzeit pro Umdrehung) Weg-Optimierung, d.h. der Schottel sucht den kürzesten Weg bei grossen Kurs-Aenderungen, läuft also im Maximum 180 Grad, in die entsprechende Richtung Kräftiger Servo-Motor, auch für grosse Schottel Die End-Lösung (Geber und Schottel-Servo) soll eine Low-Cost-Lösung werden. Wir haben uns dann aufgeteilt, Hans hat den Schottel-Antrieb gebaut und die recht komplexe Software entwickelt während ich mich mit dem Geber-Teil der RC-Steuerung beschäftigt habe und dabei die Programmierung von Micro-Prozi's in einem Cross-Kurs, zusammen mit meinem Mentor, erlernt habe. Das Ganze ist entstanden, ohne dass wir uns in dieser Zeit persönlich getroffen haben. Für mich war immer wieder verblüffend, wie Hans meine Ideen und Aenderungs-Wünsche umgesetzt hat. Einfach genial. Und ja, um die SMD-Technik sind wir dann halt auch nicht herumgekommen. Bilder: Schottel-Geber, noch nicht lackiert http://www.hamatro.ch/RC-Schottel/Schottel-Geber.JPG Schottel-Servo, Entwicklungs-Stand http://www.hamatro.ch/RC-Schottel/Schottel-Servo.JPG Springer-Tug, Test-Plattform http://www.hamatro.ch/RC-Schottel/Test-Springer.JPG Springer-Tug, "Unendlich x 360 Grad http://www.hamatro.ch/RC-Schottel/Schottel-Springer.JPG Das Video (ca. 10 MB) zeigt den Test-Aufbau unter dem heutigen Stand der Entwicklung. Ihr seht, es läuft bereits! Video: http://www.hamatro.ch/RC-Schottel/Demo-1.wmv Das System ist noch in der Phase Rest-Entwicklung, Optimierung und Test. Ueber die genaue Funktionsweise wollen wir hier nicht informieren, vielmehr werden wir versuchen, unseren ersten Prototypen am 7. August 2010, in St. Peter, live vorstellen zu können. Dazu werden wir eine Springer mit dem gut klingenden Namen: Unendlich x 360 Grad mitnehmen. Viel Spass! Hier noch die zwei Links der Entwickler: Hans 1: http://www.roehrenkramladen.de/ Hans 2: http://www.hamatro.ch/wetter.htm
-
Hallo Leute, nun möchte ich auch mal wieder etwas Modellbau betreiben, statt immer nur drüber zu reden. Zielobjekt ist eine Key Largo von Robbe, die ich mal gebraucht hier aus unserem Marktplatz gezogen habe. Die Eckdaten des Modells: Länge: 840 mm Breite 190 mm Maßstab: ca. 1:30 Das Gerät ist relativ unverbastelt, das Plastik noch gut, somit eine recht solide Ausgangsbasis. Wer das Modell kennt, der weiß, dass für den Antrieb ein "Pseudo-Z-Drive" mit Kardangelenk vorgesehen ist. Diesen Antrieb hatte ich dann auch einfach mal verbaut - befeuert mit einem 600er an 2S Lipo. Die Geschwindigkeit war schon einigermaßen okay, nur leider verursacht das Drehmoment der zentral angebrachten Schiffschraube auf Grund der schlanken Rumpfform ein heftiges Krängen, was schlichtweg bescheiden aussieht. Außerdem wird das Kardangelenk durch die Lenkbewegungen ziemlich beansprucht. Ein stärkerer Antrieb ist damit gleich mal utopisch, und besonders "Scale" sieht das Ganze auch nicht grade aus. Was tun... letztendlich habe ich mich entschlossen, das Modell zum Zweischrauber mit vollgetauchten Antrieben umzubauen. Damit gleichen sich die Drehmomente aus, es besteht die Möglichkeit, etwas mehr Dampf zu installieren, und es ergibt auch einen wesentlich stimmigeren Gesamteindruck. Wer sich mal Bilder von diversen Luxusyachten anschaut, wird feststellen, dass meist kein überdimensionaler Antriebsstrang hinter der Badeplattform zu sehen ist... Vorgesehen sind zwei wassergekühlte Leopard Brushless mit 2.950 U/V an 2S Lipo und für den Anfang 32,5er Rennschrauben von Graupner. Gut möglich, dass die dem Modell auch reichen werden. Als Regler kommen zwei wassergekühlte 60A-Seaking zum Einsatz. Mir fehlt noch praktische Erfahrung mit der BL-Technik... über sinnvolle Tipps zu dem Setup würde ich mich also freuen. Vor allem das passende Timing der Regler ist für mich noch ein Fragezeichen. Wäre schön, wenn mir da noch jemand von euch weiterhelfen kann. Als Erstes habe ich die Antriebsanlage zusammengestellt: Der Motorträger besteht aus GFK. Die angeschraubten Alu-Winkel werden später im Rumpf verklebt, so kann der gesamte Motorträger mit beiden Motoren sehr einfach ausgebaut werden. Der Wellenabstand beträgt 72mm. Die Wellenanlagen sind kugelgelagert (Edelstahllager 4x8). Wasserseitig habe ich noch eine Teflonscheibe vor das Lager gesetzt, um die Druckkräfte etwas besser aufzufangen. Motorseitig ist das Lager in eine Gummitülle eingepresst, wie sie z.B. für Kabeldurchführungen verwendet wird. Ziel ist es, die Schwingungen im Antriebsstrang zu minimieren. Durch die starren Kupplungen können die Wellen selbt bei leichten Rundlauf-Fehlern sonst nicht ausweichen. Alle Teile der Antriebsanlage sind selbst gebaut, meine Fertigungstiefe im Bastelkeller ist recht hoch... Bei passender Gelegenheit wird es auch immer mal Bilder geben, wie bestimmte Teile auf den Maschinen entstanden sind. Ich hoffe, es war so weit schon mal interessant für euch. Hohn, Spott und Beschimpfungen könnt ihr wie üblich im KOMMENTAR-THREAD loswerden.
-
Hallo bitte postet Eure Kommentare zum Pumpjet bitte hier!
-
Hallo, nachdem Baumrönne ja weitestgehend fertig ist, bestand die Gefahr von Kurzarbeit auf der Werft. Diese ist nun abgewendet. Der neue Bauauftrag für die Wulf 7 ist eingegangen. Hier einige Infos zum Original : klick mal kräftig Nach einem Besuch in Cuxhaven habe ich von den Geschwistern Wulf wohl einen Generalplan erhalten, leider ohne die Spantenrisse. Hocherfreut hat die Werftmannschaft trotzdem bereits mit dem Rumpfbau begonnen. Auf grund er fehlenden Risse kann ich nun nicht wie Üblich die Spanten zusägen, aufstellen und beplanken. Aus den Unterlagen habe ich einige Spanten grob geraten. Diese werden nun längsverschiebbar aufgestellt. Anschließend wird gestrakt, angepasst neu gestrakt bis alles einigermaßen passt. Bug und Heck mache ich aus Formklötzen. Hierhin bitte die Kommentare





-
Bei meinem kleines Jetboot (NQD Tear Into) mußte ich den Antrieb tauschen. Ich hab dann gleich die Chanche genutzt und einen Jet mit Rückfahrklappe (Graupner Minijet) montiert. Denn Rückwärts fahren kann das Boot so nicht. Und selbst mit Rückfahrklappe ist das nicht ganz einfach. Denn die Klappe wird extra gesteuert und man muss den Antrieb weiter vorwärtslaufen lassen. Dazu ist aber eine 3-Kanal Funke notwendig. Nun ist aber, m.M. nach, eine Pistolensteuerung ideal für das Gefährt. Die hat aber nur 2 Kanäle… So ein Dilemma, man müßte also die Klappe zusammen mit dem Motor steuern können. Das genau macht dieses Programm. Es wird der ESC Kanal vom Empfänger ausgewertet. Bei Vorwärtsfahrt wird der Servo an einen Anschlag gefahren, bei Rückwärtsfahrt wird der Servo automatisch an den anderen Anschlag gefahren und das Motorensignal als Vorwärtssignal ausgegeben. Dazu sind noch folgende Features wichtig: Der Servokanal muss reversible sein, und man muss den Weg einstellen können, am besten man kann die beiden Position direkt per Fernbedienung programmieren. Auch der Motorkanal sollte einstellbar sein, damit man z.B. auch günstigere Flugregler verwenden kann. Der Empfänger wird vom Pin 2 gelesen, die Ausgänge liegen auf Pin 9 (Klappenservo) und 10 (ESC). Am Anschluss 5 wird ein Taster (PRG) gegen Masse angeschlossen. Im Programm gibt es einen Programmiermodus, wenn der Taster PRG beim Einschalten gedrückt wird. Dann können die beiden Positionen des Klappenservos und die minimale und maximale Ansteuerung des ESC's gespeichert werden. Zunächst muss die obere Position gespeichert werden, dazu die Steuerung auf den gewünschten Wert einstellen und PRG drücken. Zur Quittierung blinkt die Board-LED. Danach wird die untere Position angefahren und genauso gespeichert. Jetzt die maximale Stellung des ESC, und danach die Minimalposition. Der Programmiermodus wird dann automatisch verlassen. Die Werte für die Klappe und den ESC werden im EEPROM abgelegt und beim erneuten Start auch wieder gelesen. Die minimale Position steht im EEPROM in der Adresse 0, die maximale Position an Adresse 1. (Es ist dabei völlig egal, welchen Wert die untere bzw. obere Position tatsächlich haben. Unten definiert nur den Rückwärtsbetrieb. Wie der Servo dabei stehen muss, ist völlig egal. Es wird beim Speichern einfach die programmierte Position angefahren. Das gleiche gilt auch für die andere Position.) Adresse 3 enthält den ESC Max Wert und 2 den ESC Min Wert. Weiterhin kann im Programm auch der ESC bei Rückwärtsfahrt auf halbe Leistung geschaltet werden. Dazu dient der Compilerschalter HALF_BACK_THROTTLE. Ich hab das ganze auf einer Lochrasterplatine mit Mega328 aufgebaut. Das Programm kann aber auch auf einem Tiny85 laufen.
-
Vorrichtung zum Propeller löten Nach mehreren, eher behelfsmäßigen Vorrichtungen zum Propeller löten, muss nun endlich mal was Richtiges bei. Also kurz überlegt, was soll das Teil können: Löten von Zwei- bis Vierblatt-Propellern Propellerdurchmesser bis 100 mm Höhenverstellbar verschiedene Aufnahmen für die Propellernaben Mehr fällt mir erst mal nicht ein. Aber schaun mer mal... Zu Beginn erst mal die Grundplatte. Das Teil ist aus Stahl - muss ja schließlich was wiegen. Die späteren Stützen für die Propellerblattbefestigung sollen in der Grundplatte geführt werden, also je nach Propellerdurchmesser verschiebbar sein. Die Langlöcher sind an der Unterseite etwas breiter, um später die Stützen zu arretieren. So wie die Nuten jetzt angeordnet sind, wäre auch ein Sechsblattpropeller möglich - was ich allerdings mit Sicherheit nicht brauche. In der Mitte ist ein Passtift eingepresst. Auf den werden später die Aufnahmen der Propellernaben gesteckt. Fortsetzung folgt...
-
Kommentare und Fragen zur Endless Summer
Zatzi posted a topic in Comments to Building reports: Ships
Hallo Christoph! Willkommen an Bord! Bisher gute Arbeit. Ich habe noch zwei Anregungen zu Deinem Rumpfbau. Als erstes zum Bug und/oder Heckklotz. Es gibt auch die Möglichkeit, den Bug bei kleinen Radien senkrecht zu beplanken. Dazu müsste man in Höhe der verschiedenen Wasserlinien ein paar Bögen einbauen und anschließend die Leisten senkrecht darauf ankleben. Hier ein Beispiel. Die Variante mit dem Klotz wird zwar öfters angewendet, aber ich persönlich finde die Arbeit etwas zu aufwendig. Insbesondere die viele Schleifarbeit und das genaue Anpassen der endgültigen Rumpfform. Und als zweites die Form Deines Kiels. Wie Du bereits geschrieben hast, musst Du an den breiteren Stellen etwas aufkleben, da Du die Spanten ohne den Kiel angefertigt hast - kann man halt jetzt nicht mehr ändern. In meinem Fall war es ähnlich. Jedoch habe ich den Kiel so schmal wie möglich gemacht und die Spanten einschließlich der Kielform angefertigt. Dadurch konnte ich ohne weitere Vorarbeit durchgängig Beplanken. Hier kann man es noch verhältnissmäßig gut sehen. Jens edit: der Baubericht der «Endless Summer» findet sich hier.