Search the Community
Showing results for tags 'antriebe'.
-
Hi, ich möchte die Wilhelmine bauen, bin aber noch Anfänger. Das Schiff soll ein Silofrachter werden. Den Bauplan habe ich ausgedruckt und die ersten Spanten sind auch schon ausgesägt. Wo ich noch große Schwierigkeiten habe, ist bei der Wahl des Antriebs. Bei anderen Sachen später sicherlich auch noch Ich habe natürlich hier ein wenig gelesen, aber mir fällt es nicht leicht die richtigen Komponenten auszuwählen. Propeller: Raboesch 30mm 4-Blatt Typ A Motor: Bühler BB 498 L, geht der? Wellenanlage: Was benutze ich da? Eine Kompakt Anlage von Raboesch oder doch lieber die wartungsfreie Wellenanlage? Dann nehme ich wohl am besten eine 12 V Stromversorgung. Da das Schiff geschlossen ist, kann ich ja eigentlich Bleiakkus verwenden und diese in den Laderaum packen, oder? Was fehlt mir noch zum Einbau der Antriebsanlage?
-
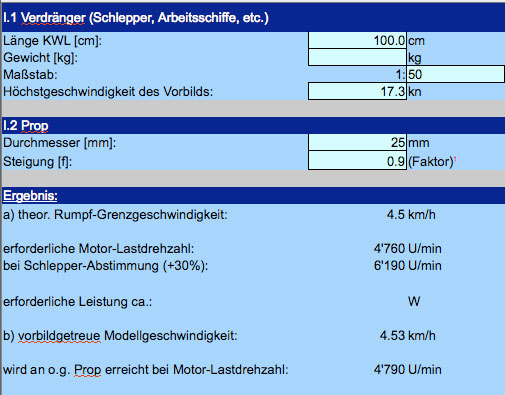
Bereits im «Vorwort und Plan-Download»-Thread habe ich die Frage gestellt und mache der Übersichtlichkeit halber hier einen eigenen Thread dafür auf. Wie wird ein «Wilhelmine»-Modell, das genau nach Plan gebaut ist, am besten motorisiert? Die Rumpfgeschwindigkeit (Vmax = Wurzel (KWL) * 4,5 km/h) liegt bei einer Rumpflänge von +/- 1 Meter bei etwa 4,5 km/h. Laut Plan sollte die Propgrösse etwa 25mm Durchmesser sein...ist er grösser, so dreht er unterhalb der Rumpfunterkante. Mit Jo_Ss «Motorcalc_V.12» sieht die Motorisierung so aus: Das heisst, dass der Motor mit rund 4800 U/min. drehen sollte, um mit einem 25mm-Raboesch-3/4-Blatt Typ A auf Rumpfgeschwindigkeit zu kommen (die haben eine Steigung von etwa 1, den Schlupf abgerechnet habe ich 0,9 angenommen...das ist so Standard, glaube ich...) Für diese Drehzahl fällt mir grad kein Langsamläufer ein, der auch von der Grösse her passen würde. Vielleicht müssen/dürfen wir hier auch mit einem Getriebe arbeiten... ...wie wärs mit einem Zahnriemengetriebe...? ...die Diskussion ist eröffnet...

-

Kommentare zum Baubericht "DGzRS Zander"
MatthiasR posted a topic in Comments to Building reports: Ships
Hier ist die "Meckerecke" zum Baubericht... -
Hallo, ich habe mit meinem Zander (aus dem bekannten Graupner Hecht-Bausatz) vor ungefähr 1,5 Jahren begonnen, hatte aber bislang gezögert, einen Baubericht zu verfassen, da es doch nur relativ langsam voran ging. Das muß ich aber wohl jetzt doch mal nachholen, bevor ich meine Baubilder in diverse fremde Threads durch das ganze Forum verstreue Ich hatte mich schon relativ früh auf den Zander festgelegt (und auch gleich die Schilder dafür geätzt). Ein Besuch in Zingst und Wustrow kam erst etwas später. Dort habe ich allerdings nur den Barsch zu Gesicht bekommen (und mich dann auch nicht weiter bemüht, evtl. auch den Zander zu besichtigen; ich war bis dahin davon ausgegangen, daß die vier Boote doch weitgehend gleich wären). Auch wenn ich nach wie vor kaum Zander-Bilder habe (und inzwischen weiß, daß in den Details eine ganze Menge Unterschiede stecken), bin ich bei der Entscheidung für den Zander geblieben (nicht nur, weil die Schilder schon fertig waren). Da ist dann eben etwas "Mut zur Lücke" gefragt. Oder anders gesagt, etwas "künstlerische Freiheit" möglich Nachbilden möchte ich den Bauzustand von 2009 - also nach dem Umbau auf den Hamilton-Jet, mit den anderen Veränderungen, die es bei diesem Umbau gegeben hat. Speziell beim Jet sind da natürlich ein paar Kompromisse nötig - der Graupner-Jet sah schon dem PP-Jet nur entfernt ähnlich, nach Hamilton sieht er noch weniger aus. Ganz vorteilhaft ist in diesem Zusammenhang die bei dem Umbau verlängerte Heckplattform - die verdeckt recht gut die doch etwas voluminöse Umkehrhaube des Graupner-Jets. Schwerpunkt des Bauberichts sollen die Dinge sein, die ich etwas anders gemacht habe, als es von Graupner vorgesehen war. Und das ist eine ganze Menge... Da ich manchmal "im Eifer des Gefechts" vergessen habe, Bilder zu machen, werden die Photos wohl nicht immer genau in chronologischer Reihenfolge sein. Mal sehen, wie das klappt. Das soll nun aber genug der Vorrede sein - jetzt geht's los: Der Jet ist zusammen- und eingeklebt (mit Tangit http://www.schiffsmodell.net/showthread.php?t=34109 ) Unten habe ich den Jet-Ansaugkanal mit einer Art Rahmen aus Alu-Blech eingefaßt, in erster Linie, um Gewindelöcher zur Befestigung des Ansauggitters schneiden zu können. Zusätzlich bringt das natürlich auch noch Stabilität. Das Spantengerüst zur Motor- und Servobefestigung habe ich aus 3 mm-PVC-Platten gebaut. Zu den vorgesehenen Holzteilen hatte ich nur wenig Zutrauen (meine letzten Modellschiff-Erfahrungen sind zwar ungefähr 30 Jahre her, aber ich erinnere mich gut, das die Modelle damals immer innen etwas feucht im Kielbereich waren...). Die Schrauben für die Befestigung der Jet-Umkehrvorrichtung sind von innen eingeklebt (und damit absolut dicht), die Jet-Teile werden dann von außen mit (Modell-) Muttern befestigt. Die Durchführungsrohre für die Steuergestänge habe ich so lang gemacht, daß die Gummimanschetten unter einer (zu öffnenden) Luke im Deck landen, so daß man auch bei aufgeklebtem Deck noch herankommt. Befestigt sind die Gummimanschetten mit kleinen Schellen. Auf das Stevenrohr habe ich einen rechteckigen Flansch aufgelötet. Dieser ist mit zwei Schrauben an dem Lagerspant befestigt, dazwischen liegt eine Dichtung. Auf diese Weise bleibt das Stevenrohr ohne Flurschaden demontierbar, falls es nötig werden sollte, z.B. bessere Lager und/oder Wellendichtungen einzubauen. Die Epoxi-Platten mit den eingelassenen Alu-Klötzen haben etwas mit der Motorkühlung zu tun, dazu später mehr...(Das hier ist eins von den Bildern, die erst etwas später entstanden sind) Ich habe die äußeren beiden Längsstringer mit halbierten 6 mm-Alurohren verstärkt (genaugenommen etwas mehr als die Hälfte und halbrund ausgefräst, damit sie gut auf dem angeformten Profil sitzen. Einfach gerade halbieren hätte wohl auch funktioniert, man hätte dann aber mehr spachteln müssen) Die Aluprofile sind ca. 42 cm lang und laufen natürlich am vorderen Ende flach aus. Sie sind mit Acrylit angeklebt und zusätzlich mit jeweils drei Schräubchen von innen gesichert. Diese Verstärkung ist nicht nur vorbildgetreu, sie bringt auch noch Stabilität in den Rumpf. Und was noch viel wichtiger ist, sie verbessert den Geradeauslauf des Bootes (das war jedenfalls mein Eindruck bei den ersten Probefahrten: Fährt fast "wie auf Schienen". Um-die-Kurve-fahren geht aber trotzdem noch ) Zuerst hatte ich noch vorgesehen, bei Bedarf eine Platte mit angelöteten Finnen anzuschrauben. Das hat zwar nichts mit dem Vorbild zu tun, aber ich hatte von anderen Modellbauer gelesen, die so eine Maßnahme schon erfolgreich angewandt haben, um den ansonsten etwas nervösen Geradeauslauf des Modells bei höheren Geschwindigkeiten zu verbessern. Dazu war eine flache Ausfräsung (auf dem Bild erkennbar hinter dem Jet-Einlaß) vorgesehen. Inzwischen habe ich diese Ausfräsung aber wieder verschlossen - und die Probefahrt hat dann ja auch bestätigt, daß die Finnen nicht nötig sind. Die verstärkten Längsstringer machten es notwendig, die Bügel am Heck neu anzufertigen, da diese ja nun etwas tiefer angesetzt werden mußten. Die Neuanfertigung (als Kunststoffplatten-Sandwich) war aber wohl kaum aufwendiger, als die graupnerschen Halbschalenteile sauber auszuschneiden und zusammenzukleben. Die mittlere Lage ragt bis in das Rumpfinnere (s. erstes Bild). Das Ansauggitter ist aus Messingteilen zusammengelötet. Die Stäbe haben einen (strömungsgünstigen!) ovalen Querschnitt, sie sind aus Flachmaterial 3x1 hergestellt. Die Zwischenräume sind 2,5 mm breit. Das Gitter wird mit vier Senkschrauben M2 befestigt und kann jederzeit zum Reinigen entfernt werden. Hier noch ein Bild des Gitters vor dem Schwärzen: [ATTACH]2732[/ATTACH] Grüße Matthias


-
Hallo, nachdem Baumrönne ja weitestgehend fertig ist, bestand die Gefahr von Kurzarbeit auf der Werft. Diese ist nun abgewendet. Der neue Bauauftrag für die Wulf 7 ist eingegangen. Hier einige Infos zum Original : klick mal kräftig Nach einem Besuch in Cuxhaven habe ich von den Geschwistern Wulf wohl einen Generalplan erhalten, leider ohne die Spantenrisse. Hocherfreut hat die Werftmannschaft trotzdem bereits mit dem Rumpfbau begonnen. Auf grund er fehlenden Risse kann ich nun nicht wie Üblich die Spanten zusägen, aufstellen und beplanken. Aus den Unterlagen habe ich einige Spanten grob geraten. Diese werden nun längsverschiebbar aufgestellt. Anschließend wird gestrakt, angepasst neu gestrakt bis alles einigermaßen passt. Bug und Heck mache ich aus Formklötzen. Hierhin bitte die Kommentare





-
Hallo, hier könnt ihr euch zur dem Bericht zur Wulf 7 auslassen..
-

Programm für die Motorisierung von Verdrängern / Halbgleitern
Guest posted a topic in Elektromotoren
Von Moderator Hansen-Bengel bearbeitet !Achtung! Leider steht dieses Tool nicht mehr zur Verfügung. Evtl. hilft eine direkte Anfrage an den Autor über seine Webseite. Bei der Planung einer sinnvollen Motorisierung für Verdränger oder Halbgleiter fallen vorab immer die selben Rechenschritte an. Um das Ganze zu vereinfachen, habe ich vor kurzem mal ein ganz banales "Programm" (ein simples Excel-File) aufgesetzt. Damit könnt ihr eure Schiffe in verschiedenen Motor-/Prop-/Akku-Setups durchkalkulieren. Die Benutzung ist sozusagen selbsterklärend. Die Motorflieger haben so etwas schon lange (und in viel komplexerer Form), darum habe ich für den Schiffchen-Bereich wenigstens mal ein einfaches Basis-Tool aufgesetzt. Was das "Programm" kann: Bei Verdrängern ist die Geschichte einfach - sie haben einen definierten Arbeitsbereich zwischen 0 km/h und Rumpfgeschwindigkeit. Die Parameter sind also klar. Das Programm spuckt anhand einiger weniger Modell- und Vorbilddaten sehr genau die passende Motordrehzahl, die passende Bordspannung und die passenden Props aus. Wenn ein Parameter kritische oder unsinnige Werte ausgibt, wird er rot angezeigt. Man kann nun z.B. rumspielen, ob man mit einem anderen Prop oder einem anderen Akku besser unterwegs wäre, etc. Interessant ist: man stellt bei den Ergebnissen sehr häufig fest, dass man bei Verdrängern ziemlich stark zur "Übermotorisierung" neigt. Was es nur eingeschränkt kann: Bei Halbgleitern ist die Sache nicht mehr ganz so klar. Zum einen muss der Benutzer zumindest halbwegs wissen, wie er bestimmte Werte liest. Z.B.: einen SRK auf 2-fache Rumpfgeschwindigkeit abzustimmen macht Sinn, auf 4-fache abgestimmt wäre Blödsinn. Genausowenig weiss das Programm, welche Geschwindigkeit ein bestimmter Halbgleiter-Rumpf überhaupt umsetzen kann. Darum bietet es an dieser Stelle zwar eine prima Kalkulationsgrundlage, aber nicht unbedingt immer praxisgerechte Ergebnisse. Was es nicht kann: Es kann keinen konkreten Motor für einen bestimmten Einsatzzweck nennen. Theoretisch wäre das zwar denkbar, aber dazu müsste man zumindest erstmal eine Datenbank mit all den Parametern für verschiedene Motortypen aufsetzen (und dazu habe ich absolut keine Lust ). Es bleibt also nach wie vor dem User überlassen, anhand der ausgespuckten Werte (Leistung, Prop, Drehzahl) einen passenden Motor selber auszuwählen, der diese Bedingungen erfüllt und z.B. den gewählten Prop auch drehen kann. Wer daraufhin dann für den ausgespuckten 45er K-Prop einen 600er SPEED wählt, ist es selbst Schuld. Das Programm kann auch keine Gleiter berechnen, da dort die Vorgaben wesentlich komplexer sind und die Anzahl der (unbekannten) Variablen nochmals erheblich höher ausfällt. Ihr könnt das File hier runterladen. Wer Verbesserungs-Vorschläge hat: gerne! Viel Spass beim spielen. -
Ahoi und einen schönen Sonntag Nach vielen Diskussionen hier im Forum, bei welchen ich mich auch beteiligt habe, ist immer wieder das Problem des Drehens von "Unendlich x 360 Grad" angesprochen worden. Wie Ihr alle wisst, bin ich daran geblieben und genau deshalb ist es etwas stiller geworden. Die Idee einer Realisierung war da, hatte aber mit einigen Tücken zu kämpfen. Dank meinem lieben Freund Hans, ja auch Hans, haben wir aus der Idee ein gemeinsames Projekt generiert. Hans habe ich in einem CNC-Forum kennengelernt und er hat mir damals die geniale Atmel-Leuchturm-Steuerung gebaut. Beim Projekt-Beginn haben wir viele Parameter besprochen und ein Konzept ausgearbeitet, da Hans und ich in verschiedenen Ländern wohnen. Die heutigen Kommunikations-Wege lassen so ein Projekt auch über Entfernungen entstehen. Die vielen Zeichnungen, Pläne, Skizzen, Schemata und Print-Layouts haben wir über einen gemeinsamen FTP-Server verwaltet und damit sichergestellt, dass wir gegenseitig immer Up-to-Date waren. Und da waren seit dem Projekt-Start Mitte April noch 227 E-Mail’s, rund 50 MB Daten-Volumen, welche zwischen Deutschland und der Schweiz vermittelt worden sind. Folgende Voraussetzungen waren uns wichtig: Umbau Sender: Kreuzknüppel ausbauen, Schottel-Geber einbauen, d.h. keine Eingriffe in die Elektronik des Senders Auf der Empfänger-Seite wird das normale Servo durch die Schottel-Steuerung ersetzt, auch hier keine Eingriffe in Empfänger und im Signal-Weg Einbau und Einstellungen für jeden Anwender einfach und transparent, eingestellte Parameter werden dauerhaft im Schottel-Antrieb auf dem Chip gespeichert Schottel-Verhalten wie im Original, also kein Super-Speed-Servo, sondern die reale Abbildung eines Schottels, mit all seinen Mängeln (z.B. Laufzeit pro Umdrehung) Weg-Optimierung, d.h. der Schottel sucht den kürzesten Weg bei grossen Kurs-Aenderungen, läuft also im Maximum 180 Grad, in die entsprechende Richtung Kräftiger Servo-Motor, auch für grosse Schottel Die End-Lösung (Geber und Schottel-Servo) soll eine Low-Cost-Lösung werden. Wir haben uns dann aufgeteilt, Hans hat den Schottel-Antrieb gebaut und die recht komplexe Software entwickelt während ich mich mit dem Geber-Teil der RC-Steuerung beschäftigt habe und dabei die Programmierung von Micro-Prozi's in einem Cross-Kurs, zusammen mit meinem Mentor, erlernt habe. Das Ganze ist entstanden, ohne dass wir uns in dieser Zeit persönlich getroffen haben. Für mich war immer wieder verblüffend, wie Hans meine Ideen und Aenderungs-Wünsche umgesetzt hat. Einfach genial. Und ja, um die SMD-Technik sind wir dann halt auch nicht herumgekommen. Bilder: Schottel-Geber, noch nicht lackiert http://www.hamatro.ch/RC-Schottel/Schottel-Geber.JPG Schottel-Servo, Entwicklungs-Stand http://www.hamatro.ch/RC-Schottel/Schottel-Servo.JPG Springer-Tug, Test-Plattform http://www.hamatro.ch/RC-Schottel/Test-Springer.JPG Springer-Tug, "Unendlich x 360 Grad http://www.hamatro.ch/RC-Schottel/Schottel-Springer.JPG Das Video (ca. 10 MB) zeigt den Test-Aufbau unter dem heutigen Stand der Entwicklung. Ihr seht, es läuft bereits! Video: http://www.hamatro.ch/RC-Schottel/Demo-1.wmv Das System ist noch in der Phase Rest-Entwicklung, Optimierung und Test. Ueber die genaue Funktionsweise wollen wir hier nicht informieren, vielmehr werden wir versuchen, unseren ersten Prototypen am 7. August 2010, in St. Peter, live vorstellen zu können. Dazu werden wir eine Springer mit dem gut klingenden Namen: Unendlich x 360 Grad mitnehmen. Viel Spass! Hier noch die zwei Links der Entwickler: Hans 1: http://www.roehrenkramladen.de/ Hans 2: http://www.hamatro.ch/wetter.htm
-
Moin, moin, ich hätte da mal ne Frage zum Fahrverhalten eines Halbgleiters, was passiert eigentlich, wenn ein Halbgleiter ins Vollgleiten kommt, kippt er einfach zur Seite? Dieses Verhalten habe ich heute, bei der ersten Testfahrt mit neuem Antrieb und Ruder bemerkt. Bei vollgeladenen Akku und Vollgas kippt die Denker nach ca 5 m Geradeasufahrt nach Steuerbord. Wenn ich dagegen nur 3/4-4/5 Gas, fahre kippt das Schiff nicht. Sehe ich das richtig, dass ich die Denker ins "Vollgleiten" gebracht habe? Grüße Silver
-
Hallo. Beim Bau meiner Smit Denemarken in 1:75 hatte ich das Problem, dass es keine passenden Kortdüsen gab, also musste ich selber Hand anlegen. Ein weiteres Problem: ich brauchte 4 Kortdüsen. Leider verfüge ich auch nicht über eine Drehmaschine (irgendetwas ist ja immer ), also nahm ich mit Herrn Gramcko Kontakt auf und ließ mir eine Kortdüse als Rohling in der benötigten Größe drehen, welche dann abgeformt und mit den nötigen Anbauten versehen werden sollte. Als erster Arbeitgang musste ich mich um das Silikon kümmern. Der Markt bietet da einiges und in verschiedenen Preislagen. Wie immer darf sowas nicht viel kosten. Wichtige war aber, dass ich Silikon haben wollte, welches im Verhältnis 1:1 gemischt wird. Bestellt wurde: Silikon mit Härter (jeweils 500gr) Resin (Gießharz ebenfalls je 500gr) 2 Mischbecher 250ml Alupulver .
-
Baubericht eines Mini-Bootes mit Jetantrieb Moin Community, eigentlich bin ich ja kein Mitläufer, der jedem Trend hinter läuft. Doch ab und zu lasse ich mich von einigen Sachen überzeugen, wie dem SpringerTug- Virus, oder, wie in diesem Fall, dem Bereich der Mini-Modelle. Da ich bekennender Liebhaber von Katamaranen und Jetantrieben bin, viel mir die Wahl meines Mini-Projektes nicht schwer. Das gewählte Schiffs-Vorbild existiert momentan nur auf dem Reißbrett und verschafft mir so eine gewisse Freiheit beim späteren Bau. Gebaut wird im Maßstab 1:30, was später eine Schiffslänge von 26cm ergibt. Beginnen wird dieser Bericht mit dem Bau der beiden Jetantriebe. Wenn mir dies, gelingt, folgt der Bau des Katamarans. Da der kleinste Jet, den es auf dem Markt zu kaufen gibt, einen Durchmesser von 19mm hat, war von Anfang an klar, dass ich diesen selber bauen muss. Der Jet wird einen Durchmesser von 10mm haben und mit einer Steuereinheit nach KAMEWA ausgestattet sein. Des Weiteren werde ich erstmals Brushless-Motoren verwenden, da gerade die Outrunner im kleinen Format noch genügend Drehmoment für die Impeller haben. Los geht´s! Den Anfang machte ein einfaches Modell der Steuerdüse aus Pappe. Zum Einem, um die Funktionsweise zu verinnerlichen und zum Anderen, um Proportionen und die Maße zu kontrollieren und gegebenenfalls zu korrigieren. So erhoffte ich mir, spätere Überraschungen vermeiden zu können. Das Modell aus Pappe entstand im Maßstab 3:1, um den Bau etwas zu vereinfachen. Später wurden die Maße dann abgenommen und für den Bau der Einheit aus 0,3mm -Messing heruntergerechnet. Auf dem Bild sieht man die 1. Düsen mit Stator und die Steuereinheit (noch ohne Teile für den Umkehrschub) >> Kommentare
-
Hallo! Bin neu hier. Mich interessiert wie ein Schottelantrieb funktioniert (im Detail) - konnte im Internet nichts finden, was den besagten Antrieb beschreibt - Ich kann es mir zwar ungefähr vorstellen, aber glaube, daß meine Vorstellung bestimmt irgendwo hakt... Ist er ein Patent, über das man nicht schreiben darf, oder ist er so "watscheneinfach"? Bitte klärt mich auf! Vielen Dank im Voraus! s17
-
Hm... ich glaube fast, man kommt für diese Anwendung an der Microprozessor-technik kaum vorbei, völlig egal, welche Anlage im Einsatz ist. Um das mal weiterzuspinnen, meine Idee dazu: Im Sender: Inkremental-Drehgeber -> Positions- und Richtungsauswertung im Prozessor -> Erzeugung eines Analogsignals für den Kanaleingang mittels I2C-Poti. ob man dann über die Pulslängen am Empfänger eine digitale Positionsinformation überträgt oder die Pulslänge direkt auswertet, sei mal dahingestellt... letzteres stelle ich mir etwas einfacher und schneller vor. Am Empfänger: PPM-Impuls (1...2ms) -> Auswertung im Microprozessor -> Ansteuerung Drehantrieb mit Inkrementalgeber oder Schrittmotor. Grüße Torsten
-
Hallo Ihr Schiffsverückten , langsam komme ich in die Phase wo ich mich für die Motoren entscheiden muss für meine 2m Fähre H/S/F Mariella Palace! Ich habe mal herumgefragt und man hat mir 2 Motoren empfohlen. Den Graupner Speed 900 BB Torque 12 V oder aber den IGARASHI SP3657-50 12V (Artikel-Nr.: 244478 ) bei Conrad Ich werde 2 Motoren in den Rumpf einbauen nur die frage welchen? Das Schiff wird nacher zwischen 17 und 20 Kg wiegen und ich brauche Motoren die das auch aushalten und das Schiff schön auf Fahrt bringen Ich hoffe das Ihr mir da weiter helfen könnt Danke euer Anek
-
Ich will die Schottel in meiner «Endless Summer» umbauen. Die Gründe dafür sind: Die Anlenkung mit Servos ist unzuverlässig, da wegen der Untersetzung sehr grosse Kräfte auftreten und deshalb immer wieder Servos durchbrennen. Der Antrieb über eine Welle mit Kegelzahnrad macht viele Laufgeräusche und kommt einem Umbau der Anlenkung in den Weg. Das Ziel ist eine ähnliche Lösung wie sie Jan in seiner Vikingbank gebaut hat. Für mich als Total-Laie auf mechanischem Gebiet stellen sich dabei fast nur Fragen, für deren Beantwortung ich sehr gerne Euer geballtes Wissen in Anspruch nehmen würde... Folgende zwei Bauteile gibt es also zu planen und bauen: der Antrieb mittels Zahnriemen die Anlenkung mittels Schneckengetriebe inkl. Positionsrückmeldung Für den Umbau habe ich meine Ideen in einer Skizze zusammengestellt: Dazu müssen die Grundplatten umgebaut werden. 1. Antrieb Motoren senkrecht in den Rumpf bauen, auf die Motorachse (6mm) und auf die Welle (5mm) je ein Zahnriemenrad befestigen und mittels Zahnriemen angetrieben. Für den Motor muss ich eine Halterung bauen, die es erlaubt, die Spannung des Zahnriemens zu verändern und fest zu stellen. Für mich stellen sich hier folgende Fragen: Wie wird so ein Zahnriemenrad auf einer Welle befestigt? Loch quer bohren - Gewinde hinein schneiden - Madenschraube? Was tun, wenn die Vorbohrung grösser ist als der Wellendurchmesser? Ich habe dieses mit 20 Zähnen für den Motor und dieses mit 60 Zähnen für die Schottelwelle ausgesucht (Übersetzung 3:1). Da der Zahnriemen an der Schottel- und an der Motorwelle «ziehen» werden: muss ich mir da eine Lagerung der Wellen überlegen, um einseitiger Abnutzung entgegen zu wirken? 2. Anlenkung Ein Schneckenrad wird auf die Anlenkachse befestigt, eine Hohlschnecke auf eine Welle befestigt und mit einer Halterung am richtigen Ort gehalten. Ein Elektromotor wird über eine Kupplung damit verbunden. Für mich stellen sich hier viele Fragen: Wie wird so ein Schneckenrad montiert? Da ist eine Nut drin, was eigentlich sehr gut und einfach wäre...aber ohne Falz auf der Welle...? Die Hohlschnecke wird wohl auf eine Stahlwelle montiert (Madenschraube?), welche dann präzise gelagert werden muss - mit einem Wellenbock und (welchem?) passenden Lager? Angetrieben wird die Welle mit der aufmontierten Hohlschnecke von einem Motor - die ganze Kombination rechnet sich wohl «rückwärts» von der gewünschten Drehgeschwindgkeit der Schottel. Ich möchte mich dabei möglichst an die Realität halten und die Schottel nicht allzu schnell drehen lassen. Jetzt brauchen sie für 180° rund 8 Sekunden. Kann mir jemand eine Kombination vorschlagen, die etwa solche Werte ergibt? Den Achsabstand habe ich noch nicht festgelegt, dazu muss ich zuerst den Umbau der Grundplatte planen... Wie entfremde ich einen (alten und ausgebrannten) Servo zweck für die Positions-Rückmeldung? Geht dafür jeder Servo - ich habe drei HS-5745MG von Hitech zum Verwenden... Hat jemand von Euch in solchen Dingen Erfahrung und kann mich beraten? Ich bin nicht in Eile mit diesem Umbau, sondern will mir zuerst einen Überblick verschaffen und dazulernen. Die genauen Masse muss ich noch nehmen.
-
Kommentare und Fragen zum Baubericht "Parat"
Guest posted a topic in Comments to Building reports: Ships
Hallo Steinbeisser, du kommst aber schön voran. Der Rumpfinneneinbau ist finde ich auch sehr schön, aber hast du die HOzplatten weiß gestrichen? und beim Gewicht würde ich im Bug noch etwas Luft lassen, da der AUfbau ja auch noch was wiegt. Baubericht ist hier. -
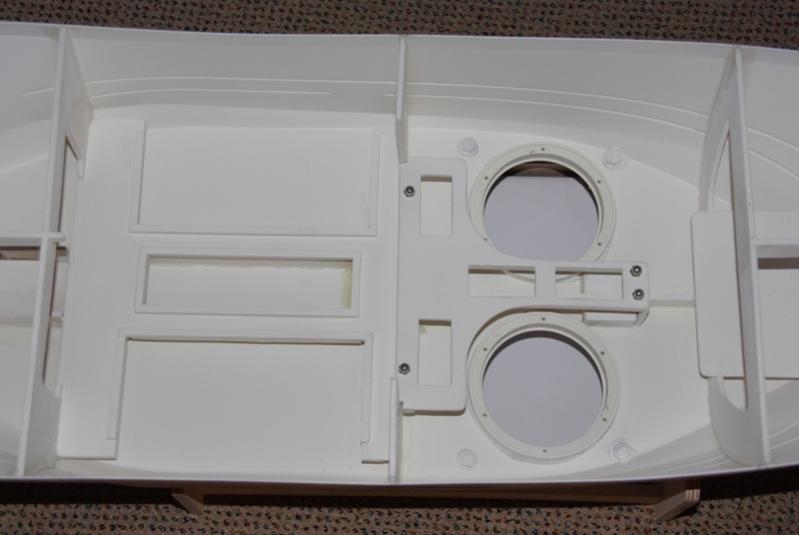
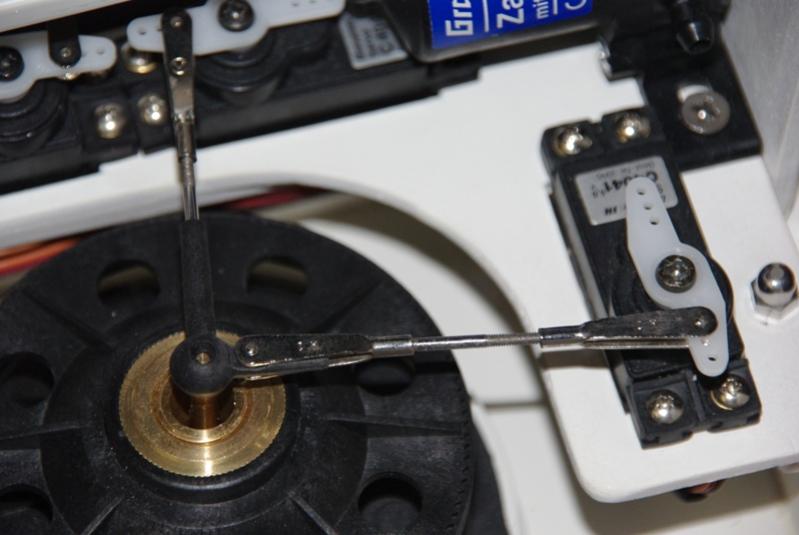
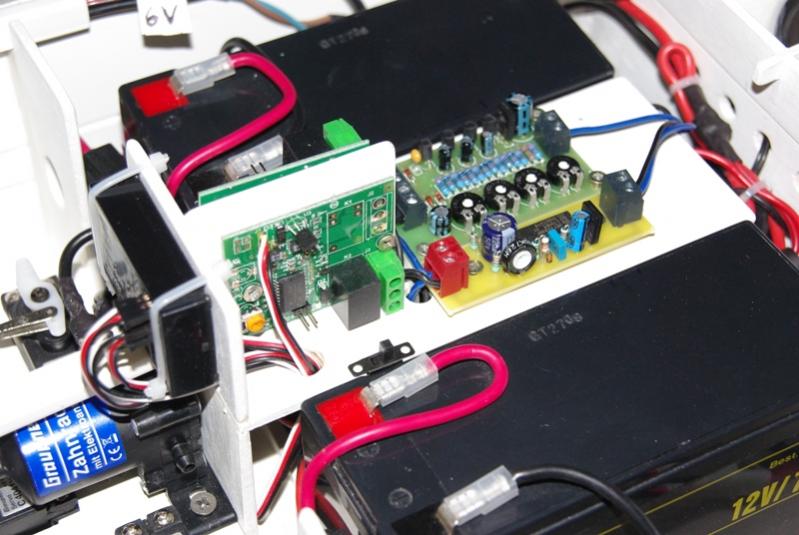
Baubericht Parat Nun möchte ich doch auch mal meinen Schlepper Parat von Graupner hier vorstellen, obwohl ich lieber weiterbasteln würde als hier am PC zu sitzen. Deshalb schreibe ich auch nicht so ausführlich, wenn Interesse an Details bestehen, bitte gezielt nachfragen, ich werde dann genauer darauf eingehen. Den Grundbausatz habe ich neu und originalverpackt mit Beschlagsatz und beiden VSPs äußerst günstig aus Österreich von privat erstanden. Als Erstlingswerk hatte ich jedoch Anfang Februar diesen Jahres noch keine genaue Vorstellung davon was da auf mich zukommt. Wie gesagt, der Grundbausatz war preiswert, dann kam jedoch 4 Wochen lang ständig alles Mögliche dazu, dass meist in der Bucht ersteigert wurde: Zuerst eine MC-12, ausgebaut mit Kanalmixern, zusätzlich erweitert mit Nautic-Splittmodul, - Empfänger und Slittdecoder um auch alle Funktionen steuern zu können, als da wären - Soundmodul, geschwindigkeitsabhängig gesteuert, No-Name Produkt, klingt aber gut - Nebelhorn von Robbe - 2 Robbe Switchmodule zur Ansteuerung der Soundelemente - Wasserpumpe mit Fahrtregler V-30 für stufenlose Drehzahlregulierung - Fahrtregler Graupner V-60 für die beiden VSPs - Relaisschaltungen für die Aus-und Ladeschaltungen für die beiden 12V/7A-Bleiakkus für Fahrtbetrieb und den 6V73A-Bleiakku für Empfänger und Sonderfunktionen - 4 Graupner 4041 Servos für VSPs und 3 Stck. für Löschmonitore - Vorbereitungen für zusätzliche Funktionen wie Beleuchtung - Graupner Ladegeräte für Sender und Bleiakkus - Kabel, Stecker, Sicherungen und unendlich viel Kleinkrams - Airbrushkompressor und Pistole - Kleber, Spachtel und so weiter… - Und nicht zuletzt ein paar Bücher Fachliteratur und einige Abende lang Studium im Schiffsmodellbauforum Nachdem ich dann so das meiste zusammen hatte konnte es losgehen. Zuerst habe ich die Anleitung durchgelesen und festgestellt das man darauf fast verzichten kann, der fantastische Bau-Blog von Lukas hat mir da schon sehr viel mehr geholfen ( wann geht es denn bei dir weiter ? ). Also zuerst die Löcher für die VSPs in den Rumpf geschnitten, mit Stechzirkel und Cuttermesser, anschließend Montage der Heckflosse. Dabei habe begonnen die Tiefziehteile lieben zu lernen… Die Montage des Schutzflügels unter den VSP war da schon interessanter, die Stützen habe ich im Rumpf und in der Unterplatte eingebohrt im Inneren mit einer Mutter verstärkt und mit Epoxydharz verklebt. Zusätzlich zu den bereits eingebauten werde ich noch weitere Stützen wie im Original dazufügen. Das Holzskelett im Rumpf habe ich stark verändert, da ich die beiden Fahrakkus weiter nach außen und tiefer montiert habe um dazwischen Platz für die Elektrik und Elektronik zu schaffen. Dazu habe ich eine Sperrholzplatte so ausgefräst das die Akkus rutschsicher in ihr stehen, aber herausnehmbar sind. Die Holzplatte zur Aufnahme der Platinen und Relais ist ebenfalls demontierbar und relativ wassergeschützt, falls doch mal Wasser eindringen sollte. Die Kabelbäume sind alle mit verpolungsicheren Steckverbindungen versehen und komplett demontierbar, da ja die gesamte Anlage bei der Lackierung entfernt werden soll und nach Montage des Decks wieder eingebaut werden muss. Die Gewichtsverteilung war dann allerdings beim ersten Probelauf in meinem Gartenteich nicht so toll, das Boot war hecklastig so das ich mich entschloss den Empfängerakku nach vorne zu verlegen, also noch mal die Montageplattformen und Kabelbäume ändern ! Die Belohnung dafür: Der Rumpf liegt jetzt exakt gerade im Wasser. Nennenswerte Probleme waren die Ansteuerung des Lautsprechers mit zwei Soundmodulen und Switchmodulen, die notwendig sind da die Module mit 12V laufen. Da ich nur einen Lautsprecher verwende, aber beide Module separat ansteuere und gleichzeitig betreiben möchte ohne das ein Modul weggeschaltet werden muss, dazu noch mit Lautstärkenregulierung für das Soundmodul, war hier schon eine kompliziertere Schaltung mit Leistungspoti notwendig. Dank einiger Ratschläge meins Elektronik-Shops hat aber auch das funktioniert. Die Funktionsprüfung war auch erfolgreich, es klappt alles, wenn auch mit einigen Anfangsschwierigkeiten, die jedoch dank des Forums meist gelöst werden konnten. Zu den VSPs: Die Originalansteuerung von Graupner ist eigentlich gar nicht funktionsfähig, da solche Verspannungen entstehen die nicht tolerierbar sind, also ändern! Die Lösungen die hier im Forum vorgestellt wurden haben mich noch nicht ganz überzeugt, da ich mich etwas gescheut habe ein Gewinde M2 in den Steuerkopf zu Bohren. Ich habe dann den einen Ausleger dicht am Kopf gekürzt und ein 2,5 mm Loch eingebohrt in das eine normale Servoanlenkung eingesteckt wurde. Funktioniert hervorragend. Die Servowegbegrenzung ist auf 35-40 % eingestellt und zusätzlich mit aufgelegten gefrästen Kunststoffscheiben mit 28 mm Innendurchmesser am Steuerknüppel der MC-12 begrenzt, da sonst bei vollem Vor-und Seitenschub bei Diagonalstellung des Knüppels die VSPs trotz Servowegbegrenzung schleifen und unangenehme Geräusche machen, so ist das aber ausgeschlossen. Da allerdings die VSPs nicht rechtwinkelig zur Mittelachse angetrieben werden zieht die Parat immer etwas nach rechts, so dass ein Kanalmischer mit 16 % Seitenschub nach links zugeschaltet werden kann. Zusätzlich habe ich zwei Kanalmischer für beide Servos für Vor-und Seitenschub programmiert, so dass ich die Parat leicht mit nur einem Steuerknüppel fahren kann. Das Fahrverhalten ist genial, vor allem die extreme Wendigkeit und die schlagartige Änderung von vorwärts auf rückwärts. Fortsetzung folgt.





-
Tipps/Fragen/Anmerkungen zum Bau der GRUBEN/HACKMACK/MEYER/FISCHER
Guest posted a topic in Seenotrettung
Hallo! Ich bin recht neu hier. Bisher hab ich mir nur die Beiträge durchgelesen und die Suchfunktion verwendet. Ja ja !!! Immer schön die Suchfunktion !!! Sonst !!!! Aber jetzt muss ich doch was fragen! Hat jemand eventuell schon eine Zubehörliste für die Bernhard Gruben???? Zur Zeit hab ich die Fidi in Arbeit, aber ich möchte mir langsam aber sicher die ersten Teile für die Bernhard Gruben besorgen. Muss leider alles bestellen oder jedes Teil aus 50 KM Entfernung holen!! Darum will schon mal anfangen alles zusammen zu bekommen. Wäre echt nett, wenn ihr mir helfen könntet!!! Gruß Dirk -
Hallo bitte postet Eure Kommentare zum Pumpjet bitte hier!
-
Hallo allerseits, immer wieder hört man das irgendwer einen Schottel Pump Jet nachgebaut hat. Leider gibt es nirgendwo wirklich interessante Bauberichte deshalb versuche ich es an dieser Stelle. Die grundlegende Funktion ist ja, von der Rumpfunterseite Wasser anzusaugen,den Wasserstrom um 180 Grad umzulenken und dann durch annähernd horizontale Düsen wieder auszustoßen. Das Ganze muss so ausgeführt werden, dass es um 360 Grad drehbar ist. Nach intensivem Studium dessen was es im Internet so gibt, habe ich mir zunächst einige Skizzen angefertigt. Und aktuell bin ich dabei die einzelnen Teile zu fertigen. Keine Zeichnung gemacht habe ich für das Gehäuse, das ich ja in den Außenmaßen im wesentlichen an den Rumpf anpassen muss. Als Material für die meisten Teile dient mir ein dickes Stück Kunststoff, denke es ist klares Polycarbonat. Die Drehteile sind weitestgehend fertig und ich denke Bilder sagen mehr als 1000 Worte. Bilder Hier Hoffe in den nächsten Tagen komme ich noch dazu die Grundplatte aus 0,5 mm dickem Messing herzustellen. so das wars fürs Erste. Eure Kommentare und Verbesserungsvorschläge bitte hier hin
-
hallo hier in anbau van mir eine antieb flugelkreis 120mm fur der neue schlepper SMITHBANK. der zweiten is auch soweit. m fr gr jan
-
Kommentare und Fragen zur Endless Summer
Zatzi posted a topic in Comments to Building reports: Ships
Hallo Christoph! Willkommen an Bord! Bisher gute Arbeit. Ich habe noch zwei Anregungen zu Deinem Rumpfbau. Als erstes zum Bug und/oder Heckklotz. Es gibt auch die Möglichkeit, den Bug bei kleinen Radien senkrecht zu beplanken. Dazu müsste man in Höhe der verschiedenen Wasserlinien ein paar Bögen einbauen und anschließend die Leisten senkrecht darauf ankleben. Hier ein Beispiel. Die Variante mit dem Klotz wird zwar öfters angewendet, aber ich persönlich finde die Arbeit etwas zu aufwendig. Insbesondere die viele Schleifarbeit und das genaue Anpassen der endgültigen Rumpfform. Und als zweites die Form Deines Kiels. Wie Du bereits geschrieben hast, musst Du an den breiteren Stellen etwas aufkleben, da Du die Spanten ohne den Kiel angefertigt hast - kann man halt jetzt nicht mehr ändern. In meinem Fall war es ähnlich. Jedoch habe ich den Kiel so schmal wie möglich gemacht und die Spanten einschließlich der Kielform angefertigt. Dadurch konnte ich ohne weitere Vorarbeit durchgängig Beplanken. Hier kann man es noch verhältnissmäßig gut sehen. Jens edit: der Baubericht der «Endless Summer» findet sich hier. -

Endless Summer: Fantasie-Adaption einer Smit Mersey/Mississippi
xoff posted a topic in Building reports: Ships
moinmoin Seit Tagen stöbere ich durch dieses geniale Forum - auf der Suche nach Infos zu meinen vielen Fragen, um mich inspirieren zu lassen und weil hier so viele spannende Beiträge zu finden sind. Ein supergrosses Kompliment an Betreiber und vor allem an die vielen kompetenten User und (Modell)Kapitäne! Vor ein paar Wochen habe ich entschieden, mich wieder an ein Schiffsmodell zu wagen. Das letzte war vor 17 Jahren der Ganzholz-Baukasten «St. Germain» von Robbe (den es leider, leider nicht mehr gibt!). Kommentare zu diesem Baubericht bitte hier abgeben. Freu mich auf Eure Meinungen! Meine Modellbau-«Karriere» begann mit der «Krabbe Tön» vor etwa 35 Jahren, der «Bugsier3» war mein zweiter Anlauf. Beide Modelle mit ABS-Rumpf und sehr detaillierten Aufbauten. Einen Abstecher in die Luft war mein extrem absturzgefährdeter «Charter» - selber fliegen ist viel einfacher als mit'm Modell... Als begabter Bastler, aber ohne Fachwissen, als Binnenländer mit grosser Affinität zur See (muss wohl was mit einem meiner früheren Leben zu tun haben) und auf der Suche nach echter Herausforderung für lange Winterabende habe ich mich entschieden, einen Eigenbau nach Bauplänen anzugehen. Schnell war klar, dass es sich um ein Arbeitsschiff handeln soll, da Sonderfunktionen, Rumpfform und Fahrbild dieser Schiffstypen mir am besten gefallen und aus meiner Sicht die grössten Herausforderungen darstellen. Irgendwie gefielen mir die Tugs der «Smit» Reederei auf Anhieb: http://www.smit.com/sitefactor/page.asp?pageid=815 ... da musste ich gar nicht mehr lange weitersuchen. Zum Glück fand ich bei Sievers (http://www.modellbau-sievers.de/) einen Bauplan für die «Mersey», welchen ich bestellte und prompt und vollkommen unkompliziert (soger in die Schweiz!) geschickt bekam. An diesem Modell interessieren mich der spezielle (aber nicht zu schwierig zu bauende) Rumpf, der Schottelantrieb und die Möglichkeit, viele Sonderfunktionen einzubauen. In der Zwischenzeit (beim Warten auf den Plan) fand ich - Internet sei Dank! - so viele interessante Details, dass ich mich entschieden habe, ausser der Rumpfform ALLES zu verändern und so einen Eigenbau zu schaffen. Dieser wird bestimmt hohen Ansprüchen an Detailtreue und originalgetreue Kombination von Form, Verwendungszweck und Aufbauten nicht standhalten - dessen bin ich mir bewusst und nehme entsprechende Kritiken gern in Kauf...lol Mein Schiff wird auf den Namen «Smit Xoff» mit Heimathafen «Basel» (wo denn sonst?) getauft werden ... wenn es je soweit kommen sollte... Nun denn, nach diesen Vorbemerkungen möchte ich den Verlauf von Planung und Ausführung dokumentieren: Schiffstyp habe ich aufgrund dieser Infos ausgewählt: http://www.smit.com/sitefactor/public/downloads/pdf/SHTR%20leaflets/Smit%20Mersey,%20Smit%20Mississippi.pdf Folgende Veränderungen möchte ich vornehmen: Bugstrahl-/Querstromruder offenes Heck für Bergung: sieht toll aus und ist eine zusätzliche Herausforderung, siehe Bild der «Smit Madura»: Kran: es gibt sehr viele Kranen (oder sagt man «Kräne»... analog der Frage, was der Plural von Wasserhahn ist...lol), da fällt mir die Auswahl sehr schwer, zumal ich so viel Funktionalität einbauen möchte wie möglich... Schottelantrieb: Schwierig wird der Antrieb, da die ab Stange käuflichen Schottelantriebe zu klein sein werden für den gewählten Massstab... hier ein Bild der «Smit Owena», auf dem Ihr diesen wunderschönen Antrieb seht, auf den ich besonderes Augenmerk legen möchte: Löschmonitor: 'türlich sollen auch auf meinem Schlepper Löschmonitore zur allgemeinen Belustigung beitragen... ein eher einfaches Unterfangen, da es verschiedene voll funtkionsfähige Modelle zu kaufen gibt... Schlepp-/Ankerwinde: sowohl die Bug- wie die Heckwinde sollen voll funktionsfähig sein... das wird ein Eigenbau... darauf freue ich mich besonders! Die Informationsflut im WWW ist unüberschaubar und ich möchte Dich nicht damit langweilen, sondern konkret zur Realisation schreiben. Hier noch ein paar nützliche Links: http://j-eyres.fotopic.net/c1256804.html http://www.meckiweb.de/schiffsmodellbaulinks.htm http://www.schiffe-boote-modellbau.de/ships_and_pics.htm http://www.schiffs-modell-bau.net/Veranstaltungen/Veranstaltungen_index.htm http://www.tugboats.de/gallery2/main.php http://www.steinhagen-modelltechnik.de/htm/ig_lloyd_modellbauplaene.htm http://www.christian-schmidt-fachbuchhandlung.de/default.php?cPath=90&osCsid=6b8391294290be4aefcbc23a92fa1076 http://www.gemo-netz.de/rostock/rostock_bilder/schiffsbilder/schiffsbilder_Hafen.php http://www.smc-oldenburg.de/modelle-3000.html http://www.smbc-langenhagen.de/ In der Zwischenzeit ist der Bauplan gekommen. Er ist im Massstab 1:50, was eine Modellgrösse von ca. 60cm ergeben würde. Das ist mir eindeutig zu klein, also lasse ich die beiden wirklich gut ausgestalteten Pläne (Kompliment an Sievers!!!) auf 200% vergrössern, was «Leintücher» in der Grösse von 1,5 mal 3 m (!) ergibt. Doppelt so gross (1:25) sieht der Plan dann so aus: Von Moderator Torsten bearbeitet Bitte beachten, dass Baupläne - auch auszugsweise - nicht veröffenlicht werden dürfen. Die Links wurden dementsprechend entfernt. ...bitte beachte die Grösse des Bleistifts... Die erste (und einfache) Fleissarbeit war das Erstellen der Spantenrisse: vom Originalplan Kopien angefertigt, modifiziert und entsprechend vergrössert: Die zum Übertragen bereiten Spantenrisse: Mittels «ReMount» auf den 9mm-Sperrholz-Brettern fixiert ...beachte die Wasserlinie als horizontale Linie, die Längsachse als senkrechte Linie, sowie die Verlängerung an der Oberseite für die Montage auf der Helling. Dieser «Montage-Lappen» ist absichtlich gross gewählt, um die Demontage nach dem Bau so einfach wie möglich zu gestalten. Im Moment bin ich daran, die Spanten auszusägen, zu bearbeiten, auszurichten, Versteifungen vorzubereiten und alles auf der Helling zu befestigen... mehr Text und Bilder, wenn ich soweit bin... die wunderschöne Herbstsonne ruft jedoch, so dass ich wohl einen Teil des Sonntags mit Familie draussen verbringen muss (auch wenn es mich eigentlich in mein winziges Atelier zieht... kommt Dir dieses Dilemma bekannt vor...?) bis denne Xoff Von Moderator antias bearbeitet Bilder in Links umgewandelt. Beachte Copyright, sowohl für Bilder als auch für Pläne. *danke@antias* 6. Oktober 2008, 01.15h Habe fast den ganzen Sonntag an meiner Smit gearbeitet. So hat es mir heute gereicht, den Kiel zu legen, sowie alle Verstrebungen zwischen den Spanten anzubringen. Aus einem anderen Bericht (http://www.schiffsmodell.net/showthread.php?t=28769) hatte ich die Idee mit einer Gewindestange in Kielnähe zur Versteifng aufgepickt. Diese habe ich dann aber zugunsten von 10mm Buchenrundhölzern verworfen. Irgendwie gefiel mir die Verwendung von Metall im Holzgerüst nicht. Ausserdem haben die Rundhölzer einen entscheidenden Vorteil: sie lassen sich wunderbar und mit einfachsten Mitteln anpassen. Das Einpassen der rund 6cm langen bereitete jedoch einige Mühe... gelungen ist es dennoch. Hier ein paar Bilder: Spanten auf helling montiert, bereit zum Kiellegen: Kiel bereit: achte af die beiden Spanten am Bug: sie sind in den verstärkten Bug eingefädelt und vorgängig verleimt worden: Kiel montiert, verleimt: Montage der Verstrebungen, eine knifflige Aufgabe. Beachte den fehlenden Spant am Heck. Er wird später eingepasst, da für die Schottelantriebe an dieser Stelle Vorkehrungen getroffen werden müssen: Hier ist die verstärkte Bodenplatte im Heck eingebaut, ebenso der fehlende Spant eingepasst (die Beplankung wird über diese Bodenplatte verlaufen): Und als Krönung meines Sonntags: das Rumpfgerüst: Gute N8 Xoff Alle Bilder veröffentliche ich übrigens in meiner Mac-Fotogalerie:http://gallery.me.com/xoffpardey/100008